Astratto
La programmazione di un braccio robotico per una macchina per stampaggio a iniezione non riguarda solo l'impostazione della posizione dell'asse, l'abilitazione/disabilitazione dei cilindri e di altri componenti EOAT, ecc., ma include anche le impostazioni del segnale per consentire al robot di comunicare con la macchina per stampaggio a iniezione, le impostazioni del prodotto, le impostazioni dello stack, la configurazione della macchina, le impostazioni di sistema, le impostazioni dei punti di sicurezza, ecc. In questo capitolo analizzeremo passo dopo passo come configurare questi parametri dei bracci robotici.
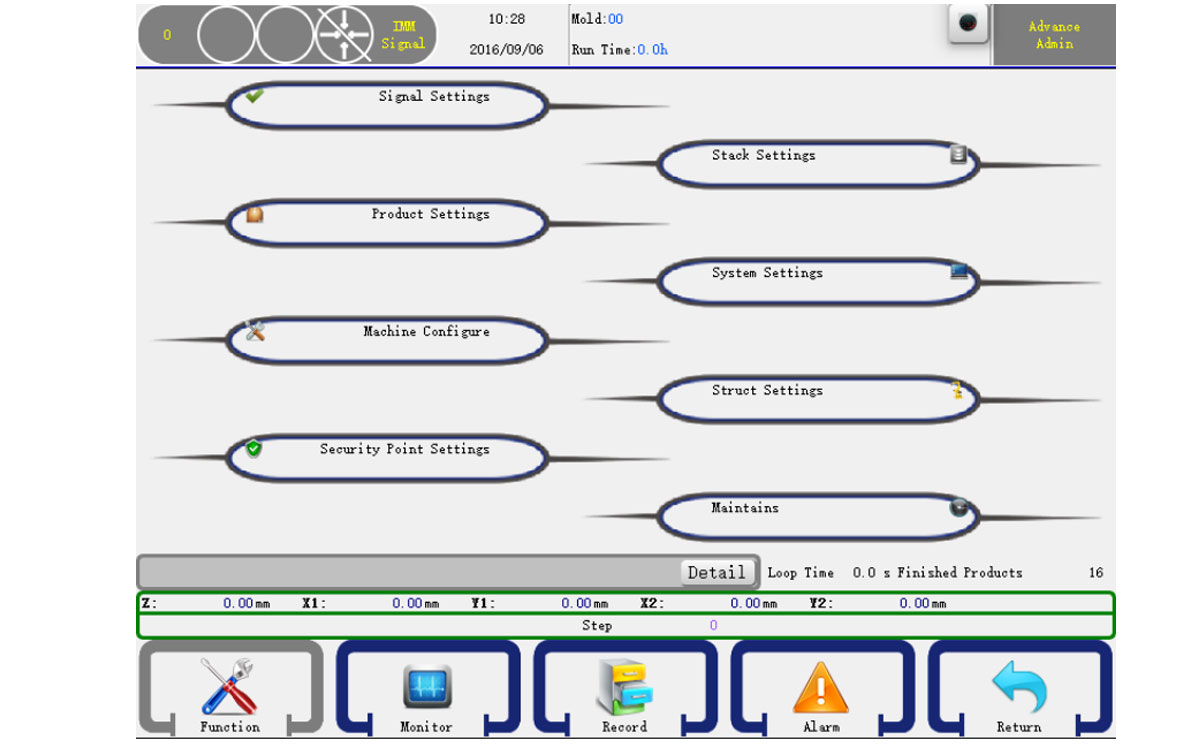
Nello stato di arresto, fare clic sulla voce di menu Funzione sulla barra del menu principale per accedere alla pagina di configurazione della funzione. Come mostrato di seguito:
È possibile selezionare un gruppo di funzioni in questa pagina. Cliccando sull'elemento si aprirà la pagina delle impostazioni dettagliate corrispondente. Le impostazioni della struttura possono essere impostate solo dall'
Amministratore Avanzato.
7.1 Impostazioni del segnale
Fare clic sulla voce Impostazioni segnale per accedere alla pagina delle impostazioni del segnale, come mostrato di seguito:

- Rileva Apparecchio 1-4:
Positivo: Verifica se il segnale di ingresso dell'apparecchio è attivo.
Inverso: Verifica se il segnale di ingresso dell'apparecchio è disattivato. - Sub Fixture
Positivo: verifica se il segnale di ingresso del dispositivo è attivo.
Inverso: verifica se il segnale di ingresso del dispositivo è disattivato. - Rileva posizione:
Orizzontale:La postura deve essere in posizione orizzontale quando si esegue l'azione di traslazione.
Verticale:La postura deve essere in posizione verticale quando si esegue l'azione di traslazione.
Nessun limite: Nessun limite: Non rileva. - Rileva origine:
Orizzontale:La postura del braccio robotico deve essere orizzontale durante l'esecuzione dell'azione di traslazione.
Verticale:La postura del braccio robotico deve essere verticale durante l'esecuzione dell'azione di traslazione.
Nessun limite:Nessun limite: Non rileva. - Posizione U/D:
Orizzontale:La posizione del braccio robotico deve essere orizzontale durante l'esecuzione dell'azione di traslazione.
Verticale:La posizione del braccio robotico deve essere verticale durante l'esecuzione dell'azione di traslazione.
Nessun limite:Nessun limite: Non rileva. - Standby a freddo:
Blocco stampo con limite: La chiusura dello stampo si attiva solo dopo che il braccio robotico si è spostato in posizione di standby.
Blocco stampo senza limite: La chiusura dello stampo si attiva non appena il braccio robotico ha iniziato a muoversi verso l'alto. - Chiudi stampo:
Utilizzo: Il robot si sposterà nello stampo per il prelievo dei pezzi solo dopo il segnale Stampo aperto emesso dopo il segnale Stampo chiuso, altrimenti verrà emesso un allarme Stampo non bloccato.
Non utilizzare: Il robot non rileverà il segnale Stampo chiuso, ma entrerà nello stampo per il prelievo dei pezzi non appena riceverà il segnale Stampo aperto. - Rileva porta di sicurezza:
Utilizza: Allarme quando la porta di sicurezza è aperta quando il robot è in funzione automatica, indipendentemente dall'azione.
Non utilizzare: Allarme quando la porta di sicurezza è aperta quando si esegue l'azione di abbassamento del braccio. - Rileva pressione:
Utilizzo: Il robot controllerà la pressione dell'aria compressa; se inferiore al valore standard, verrà emesso un allarme.
Nessun utilizzo: Non controllare la pressione. - Rilevamento a metà stampo:
Utilizzo: Il robot controllerà il segnale a metà stampo; se non c'è segnale quando il braccio del robot si abbassa all'interno dello stampo, verrà emesso un allarme.
Nessun utilizzo: Non controllare il segnale a metà stampo. - Blocco collegamento espulsione:
Utilizzo: Il segnale di abilitazione espulsione sarà disattivato al termine dell'apertura dello stampo e il segnale "Abilitazione espulsione" dovrà essere inserito nel programma.
Nessun utilizzo: Il segnale Abilitazione espulsione sarà normalmente attivato. - Funzionamento automatico
Utilizzo: Il robot controllerà il segnale Auto dalla macchina per stampaggio a iniezione; se non viene rilevato in modalità automatica, verrà generato un allarme. Nessun utilizzo: Il robot non controllerà il segnale Auto dalla macchina per stampaggio a iniezione.
7.2 Impostazioni del prodotto
Fare clic sul pulsante Impostazioni prodotto per accedere alla pagina delle impostazioni del prodotto, come mostrato di seguito:
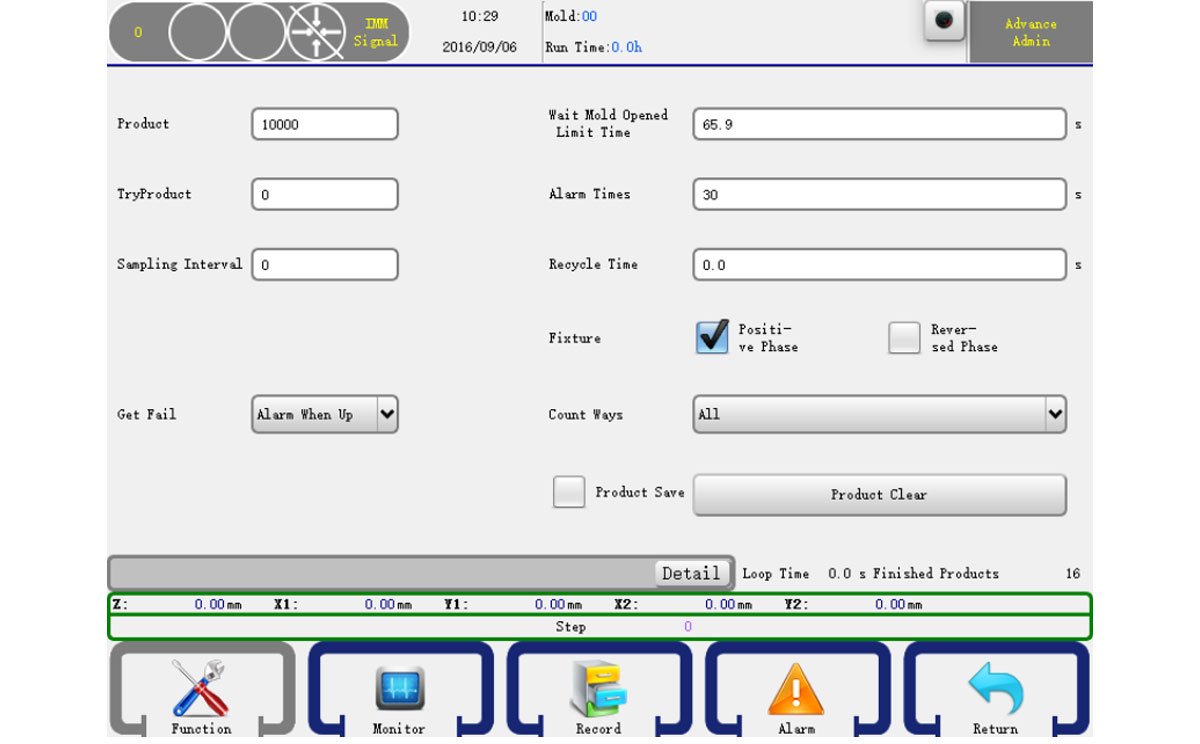
- Prodotto: Imposta il conteggio dei prodotti; quando supera il numero impostato, scatta l'allarme.
- Produzione di prova: Numero di prodotti per la produzione di prova.
- Intervallo di campionamento: l'intervallo entro il quale verrà prelevato un campione per il controllo di qualità.
- Ricevi errore:
Allarme attivato: Attiva l'allarme quando viene rilevato un segnale di errore.
Allarme: Allarme attivato dopo il fallimento del prelievo dei pezzi. - Attendi apertura stampo tempo limitato: il tempo di attesa del segnale Stampo aperto; il robot emette un allarme se il tempo di attesa è superiore a quello impostato.
- Orari di allarme: l'orario in cui l'allarme continua.
- Cancellazione prodotto: Cancella il conteggio dei prodotti finiti.
- Tempo di riciclo: Quando si seleziona la funzione Stampo bloccato, è il tempo trascorso il quale il sistema ha ricevuto il segnale di Stampo chiuso e il segnale di Abilitazione stampo disattivato.
7.3 Configurazione della macchina
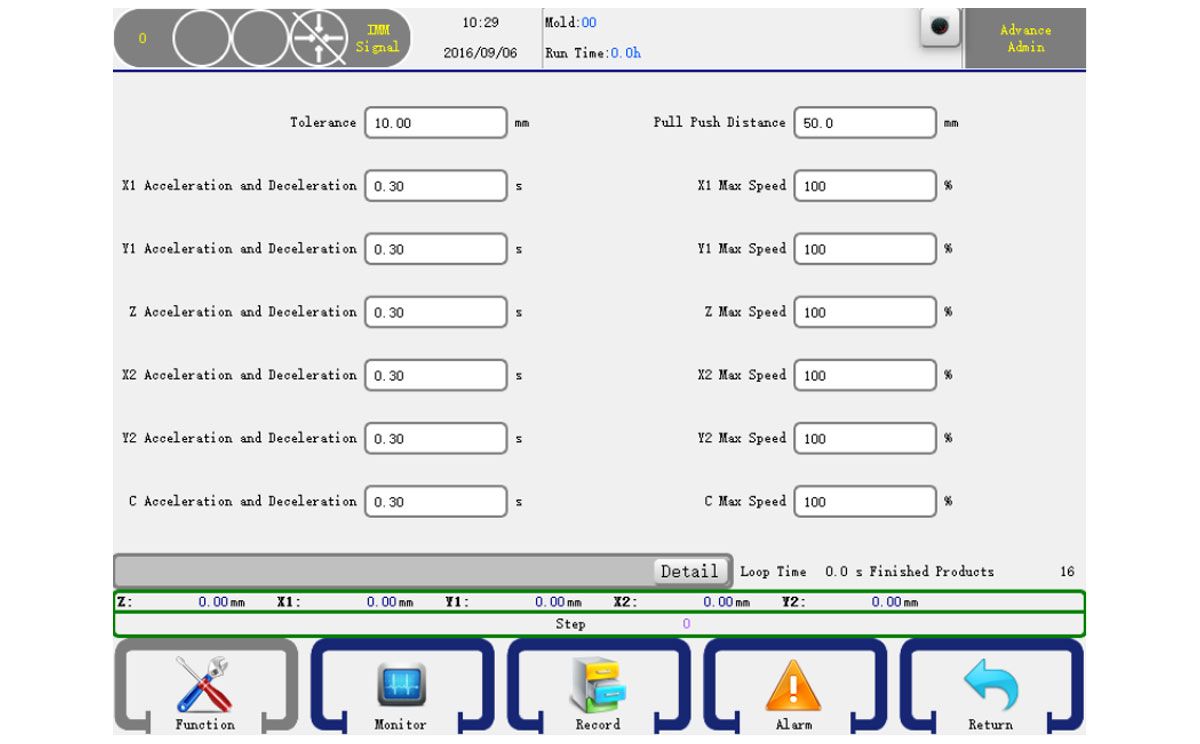
Fare clic sul pulsante Configurazione macchina per accedere alla pagina di configurazione della macchina, come mostrato di seguito:
Tolleranza: Tolleranza tra l'impulso inviato e l'impulso di feedback del servo.
Zona di sicurezza: Zona di sicurezza tra i bracci e i sottobracci.
Accelerazione e decelerazione X, Y, Z: Tempo di accelerazione e decelerazione dell'asse servo.
Velocità massima X, Y, Z: Velocità massima dell'asse servo.
7.4 Impostazioni del punto di sicurezza
Fare clic sul pulsante Impostazioni punto di sicurezza per accedere alla pagina delle impostazioni del punto di sicurezza, come mostrato di seguito:
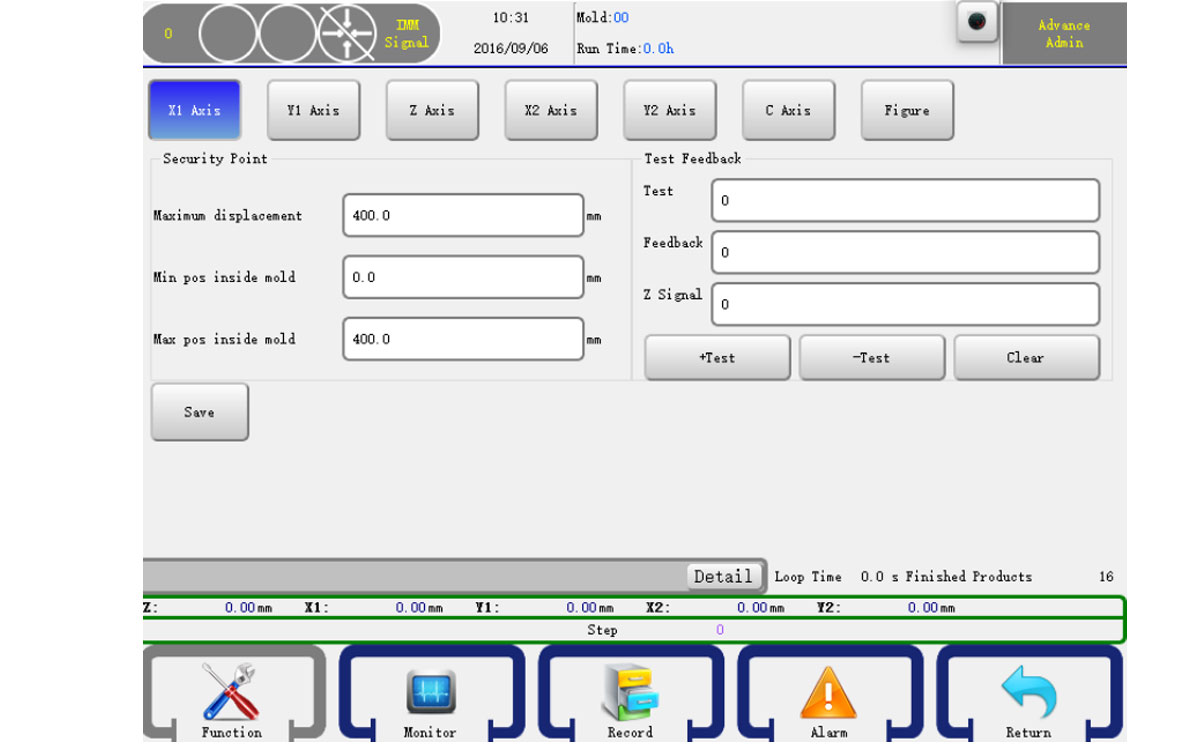
- Premi la voce di menu X in alto per selezionare l'asse che desideri visualizzare.
Max: Il massimo movimento dell'asse.
Massimo interno: La posizione massima che l'asse può muoversi nella macchina.
Minimo interno: La posizione minima che l'asse può muoversi nella macchina.
+Test: Testa l'impulso positivo del servo.
-Test: Testa l'impulso di riserva del servo.
Cancella: Cancella i dati del test.
Al termine, fai clic sul pulsante Imposta i per confermare. - Premere la voce di menu Y1 in alto per selezionare l'asse che si desidera visualizzare.
Standby massimo: Imposta i punti massimi dell'asse Y1 in posizione di standby.
Distanza dall'origine: Posizione di Y1 prima dell'operazione OPR.
Premere la voce di menu Y1 in alto per selezionare l'asse che si desidera visualizzare. - Premere la voce di menu Z in alto per selezionare l'asse che si desidera visualizzare.
Zona di sicurezza interna: Impostazione di un numero che rappresenta la zona di sicurezza all'interno della macchina.
Zona di sicurezza esterna: Un numero che indica la distanza di sicurezza all'esterno della macchina. - Premi la voce di menu C in alto per selezionare l'asse che desideri visualizzare.
Intervallo di sicurezza trasversale: Un angolo di sicurezza quando ci si sposta verso la trasversalità. - Premere la voce di menu Struttura in alto. Come mostrato di seguito:
Aumento minimo all'interno dell'asse X: Posizione minima per X quando il braccio si solleva nella macchina.
Aumento massimo all'interno dell'asse X: Posizione massima per X quando il braccio si solleva.
Aumento minimo all'esterno dell'asse Y: Posizione minima per Y quando il braccio si solleva fuori dalla macchina.
Aumento massimo all'esterno dell'asse Y: Posizione massima per Y quando il braccio si solleva.
Attenzione: È possibile modificare la posizione minima e massima della X nel campo parametro asse X della pagina dei parametri meccanici.
7.5 Impostazioni dello stack
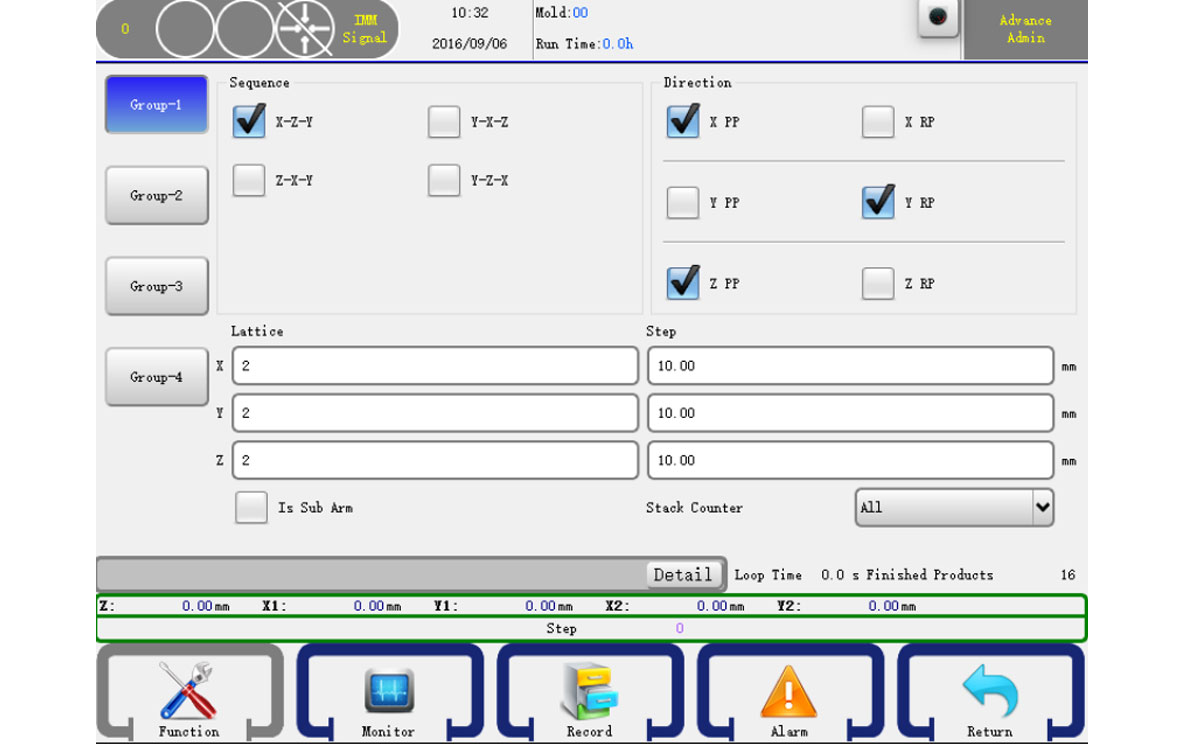
Fare clic sulla voce Impostazioni stack per accedere alla pagina delle impostazioni stack, come mostrato di seguito:
Il nostro sistema prevede quattro impostazioni di impilamento.
Sequenza: Seleziona la sequenza di impilamento
RP X: Se selezionato, il robot impila in senso inverso sull'asse X.
RP Y: Se selezionato, il robot impila in senso inverso sull'asse Y.
RP Z: Se selezionato, il robot impila in senso inverso sull'asse Z.
7.6 Impostazioni di sistema
7.6.1 Impostazione
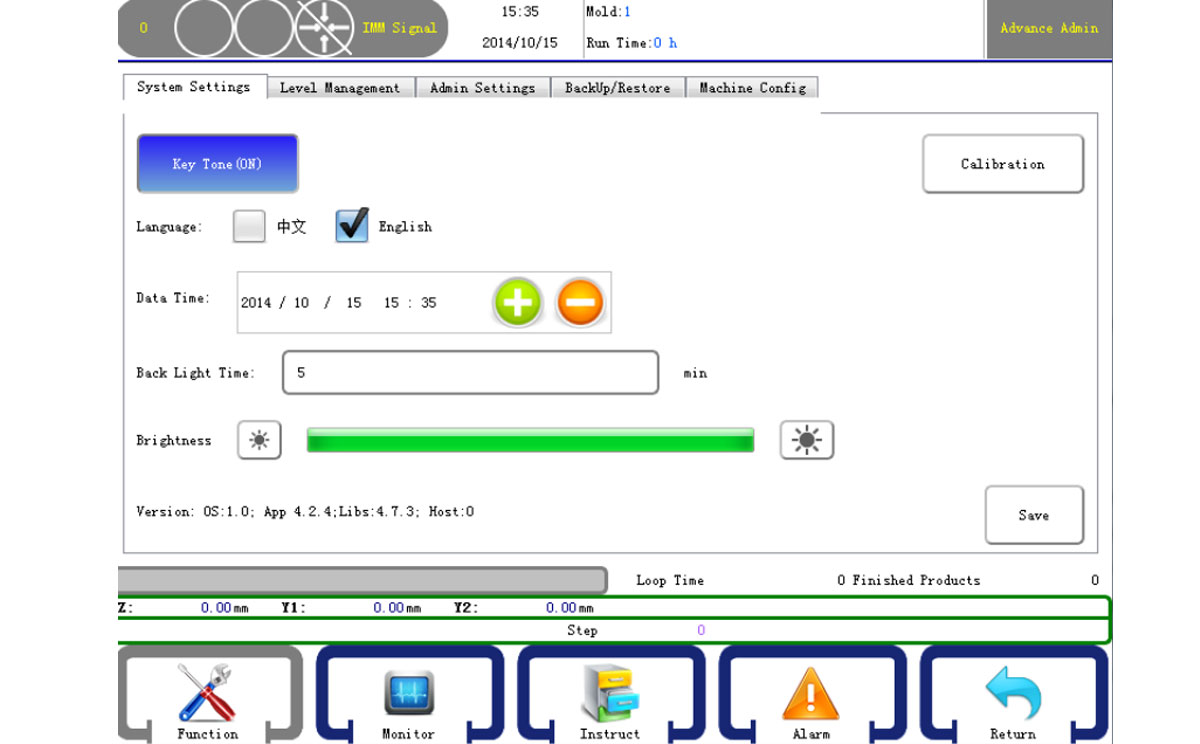
Fare clic sulla voce Impostazioni di sistema per accedere alla pagina delle impostazioni di sistema, come mostrato di seguito:
Tono tasti: Quando si preme, la tastiera emette un segnale acustico se è attiva.
Lingua: Seleziona la lingua dell'interfaccia.
Data e ora: Imposta la data e l'ora correnti.
Ora retroilluminazione: Se non viene eseguita alcuna operazione nell'impostazione dell'ora, la retroilluminazione si spegne.
Versione: Versione del sistema.
Fai clic su Salva per confermare una volta completate le impostazioni di sistema.
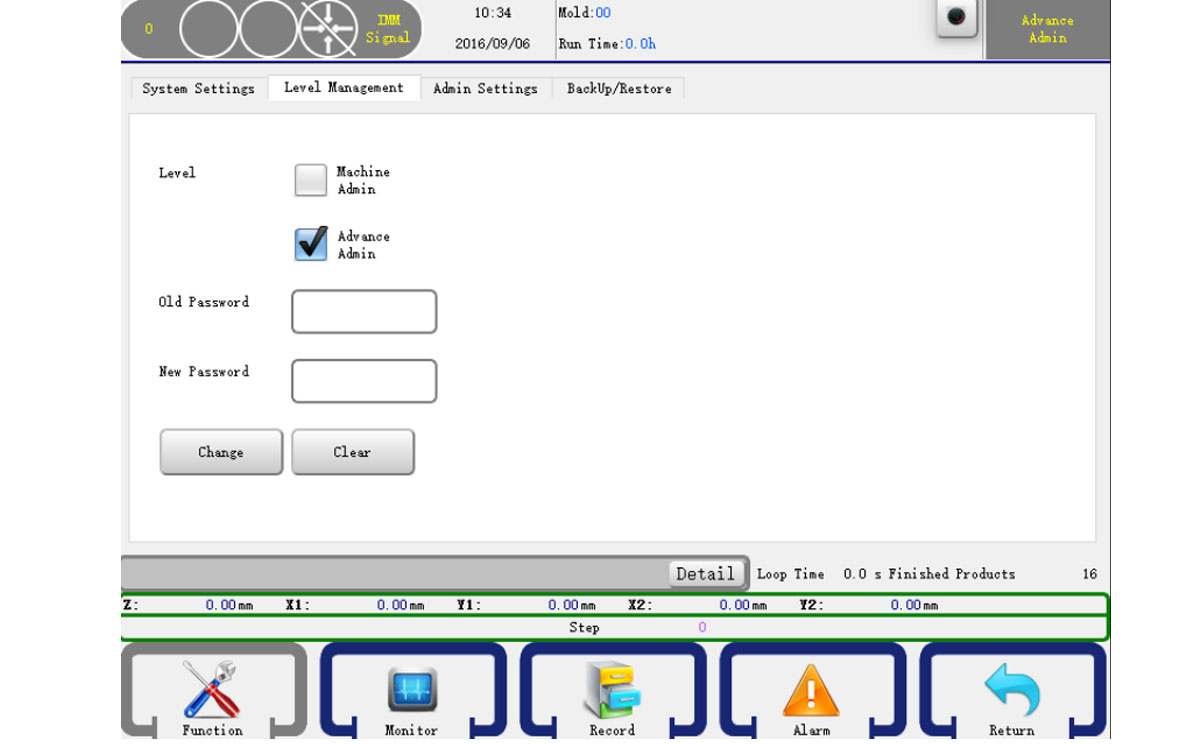
7.6.2 Gestione dei livelli
Fare clic sulla voce Gestione livelli per accedere alla pagina delle impostazioni di sistema, come mostrato di seguito:
La gestione dei livelli può modificare le informazioni di base, mentre l'amministratore può modificare qualsiasi parametro. Inserisci la vecchia password, quindi inseriscine una nuova e conferma, per modificare la password.
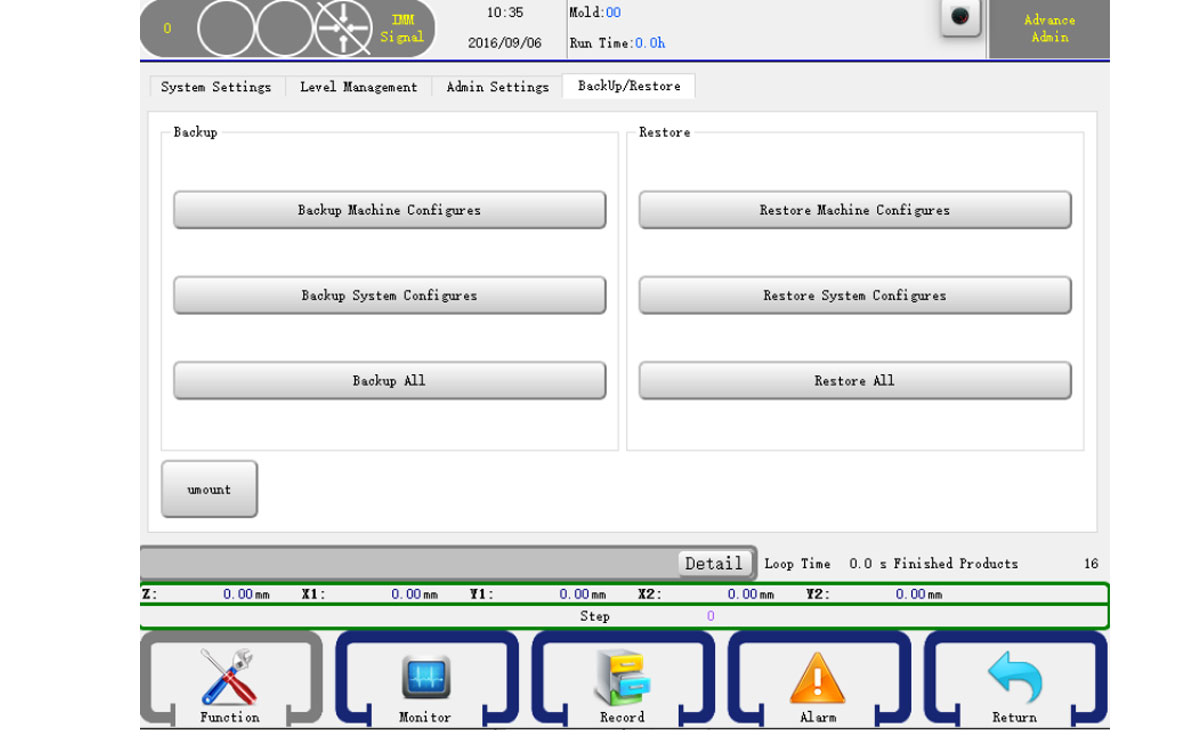
7.6.3 Backup/Ripristino
Fare clic sulla voce Backup/Ripristino per accedere alla pagina delle impostazioni di sistema, come mostrato di seguito:
È possibile utilizzare la chiavetta USB per eseguire il backup o il ripristino di "Parametri macchina", "Parametri di sistema" e "Parametri stampo" oppure selezionare tutti i dati per il backup/ripristino.
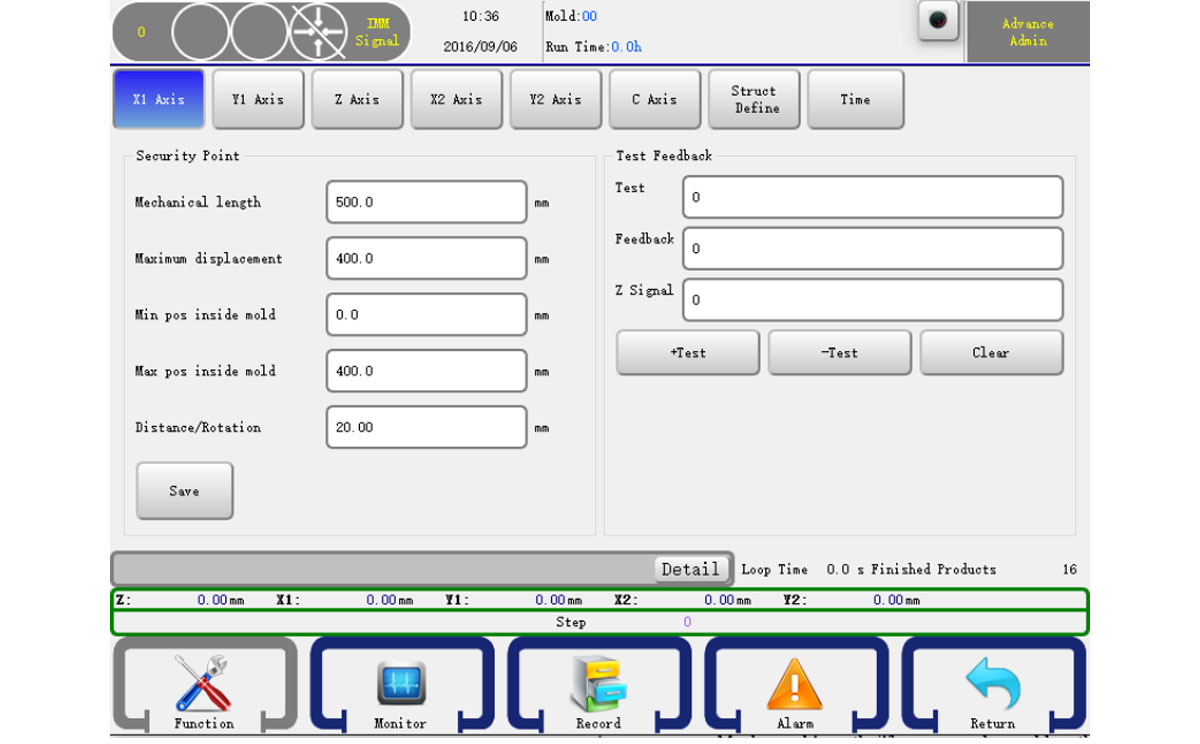
7.7 Impostazioni della struttura
Fare clic sulla voce Impostazioni struttura per accedere alla pagina delle impostazioni della struttura, come mostrato di seguito:
Lunghezza meccanica: La lunghezza meccanica dell'asse.
Distanza/Rotazione: La distanza di una rotazione del servo.
È anche possibile impostare altri parametri come 5.4. Premere il pulsante Salva per confermare la modifica. ATTENZIONE: La definizione della struttura può causare danni alla macchina e lesioni personali! Contattare il produttore.
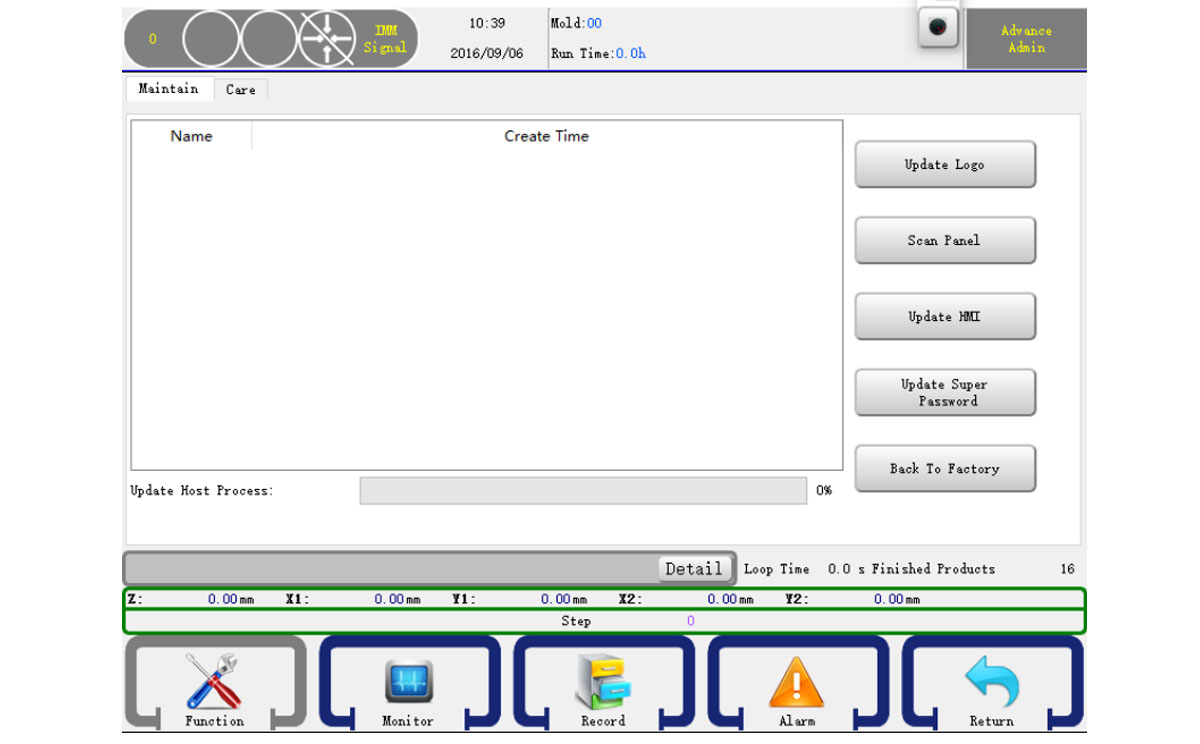
7.8 Mantiene
Fare clic sulla voce Mantiene per accedere alla pagina di manutenzione, come mostrato di seguito:
È possibile aggiornare il sistema del pannello di controllo tramite USB. Inserire il pacchetto di aggiornamento del sistema su un disco USB. Fare clic sul pulsante Aggiorna e attendere qualche istante. La pagina mostrerà la versione del sistema se è possibile controllare il pacchetto di aggiornamento del sistema dal disco. In caso contrario, premere nuovamente il pulsante Aggiorna o utilizzare un altro disco USB. Se il pacchetto di aggiornamento del sistema è stato controllato, fare clic sul pulsante Aggiorna per avviare l'aggiornamento del sistema. Al termine, verrà visualizzato un messaggio e il sistema si riavvierà, quindi sarà possibile scollegare il disco USB.