
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Manuale, arresto e automatico sono i tre stati operativi dei bracci robotici per macchine per stampaggio a iniezione, che l'operatore può selezionare tramite l'interruttore in alto a sinistra del controller manuale. In questo capitolo spiegheremo come utilizzare e programmare il braccio robotico nelle fasi di test, programmazione, impostazione dei parametri e funzionamento automatico.
Per far sì che il robot possa funzionare automaticamente e correttamente dopo l'accensione, è necessario che ogni asse, ventosa e dispositivo di fissaggio, tornino in posizione di riposo.
In modalità di arresto, premere una volta il pulsante "Home", quindi premere il pulsante "Start" per tornare alla posizione iniziale con ciascun asse Y1(Y2), X1(X2), Z in ordine. Contemporaneamente, una finestra di dialogo ricorda che si sta eseguendo l'operazione OPR e che tutti tornano alla posizione di origine, ovvero che la posizione di ciascun asse elettrico è 0.
Quando tutti gli assi, la ventosa e il dispositivo di fissaggio tornano nella posizione iniziale, in alto a destra dello schermo viene visualizzata un'icona  , è possibile utilizzare la modalità automatica e manuale.
, è possibile utilizzare la modalità automatica e manuale.
Non è possibile utilizzare le impostazioni manuali o automatiche né modificarle quando l'OPR è attivo. In caso di emergenza, premere il pulsante di arresto o il pulsante di arresto di emergenza per arrestare l'OPR.
Ruotando la manopola verso sinistra, il robot entrerà in Stato Manuale. Come mostrato di seguito:
5.2.1 Azione dell'asse
Gli utenti non possono muovere i bracci prima di aver impostato l'origine, ma possono azionare le valvole pneumatiche.
 | Controllo pneumatico: Braccio principale verso l'alto con una pressione Controllo elettrico: Braccio principale sollevato con la pressione esercitata. Il movimento si arresta al rilascio della pressione. |
 | Comando pneumatico: Braccio principale abbassato con una pressione. Controllo elettrico: Braccio principale abbassato con la pressione. Il movimento si arresta al rilascio della pressione. |
 | Controllo pneumatico: Braccio della morsa verso l'alto con una pressione una volta. Controllo elettrico: Braccio della morsa premuto. Il movimento si arresta al rilascio della pressione. |
 | Comando pneumatico: Braccio della morsa abbassato con una pressione. Controllo elettrico: Braccio della morsa abbassato con la pressione esercitata. Il movimento si arresta al rilascio della pressione. |
 | Comando pneumatico: Braccio principale indietro con una pressione. Controllo elettrico: Braccio principale indietro con la pressione. Il movimento si arresta al rilascio della pressione. |
 | Comando pneumatico: Braccio principale in avanti con una pressione. Controllo elettrico: Braccio principale in avanti con la pressione esercitata. Il movimento si arresta al rilascio della pressione. |
 | Controllo pneumatico: Braccio secondario all'indietro con una pressione una volta. Controllo elettrico: Braccio secondario indietro con la pressione esercitata. Il movimento si arresta al rilascio della pressione. |
 | Controllo pneumatico: Braccio secondario in avanti con una pressione una volta. Controllo elettrico: Braccio ausiliario in avanti con la pressione esercitata. Il movimento si arresta al rilascio della pressione. |
 | Controllo pneumatico: La postura si trasforma in posizione verticale premendo una volta. Controllo elettrico: La postura si muove verso la posizione verticale quando viene premuta. Il movimento si arresta quando la pressione viene rilasciata. |
 | Controllo pneumatico: La posizione del braccio robotico viene ruotata in posizione orizzontale premendo una volta. Controllo elettrico: Il braccio robotico si porta in posizione orizzontale quando viene premuto. Il movimento si arresta quando la pressione viene rilasciata. |
 | Attraversare dentro |
 | Attraversare fuori |
5.2.2 Azione di fissaggio
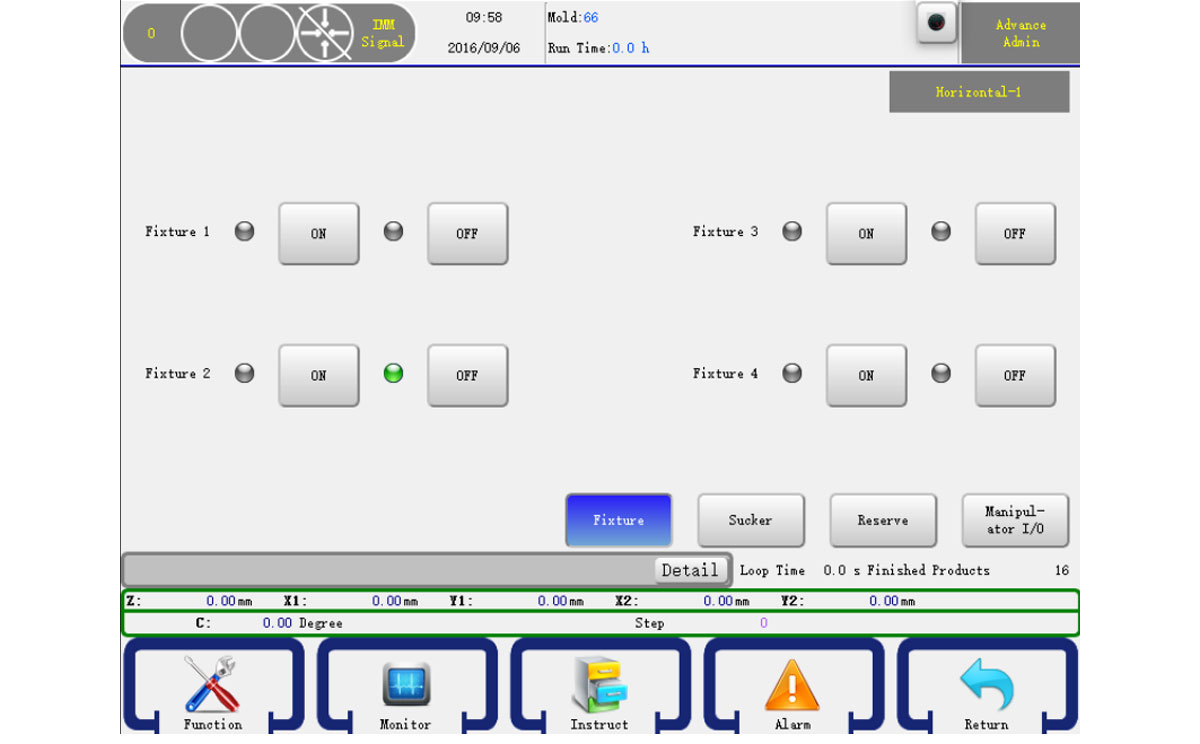
Nella pagina del manuale, fare clic sul pulsante Fixture in basso a destra per accedere alla pagina del manuale del dispositivo, come mostrato di seguito:
Ci sono quattro apparecchi. Premere il pulsante ON per accenderlo e premere il pulsante OFF per spegnerlo.
Attenzione: il segnale di ingresso è rosso e quello di uscita è verde. L'indicatore di ingresso o di uscita è spento in assenza di segnale.
5.2.3 Azione di aspirazione
Nella pagina del manuale, clicca sul pulsante [Sucker] in basso a destra per accedere alla pagina del manuale, come mostrato di seguito:
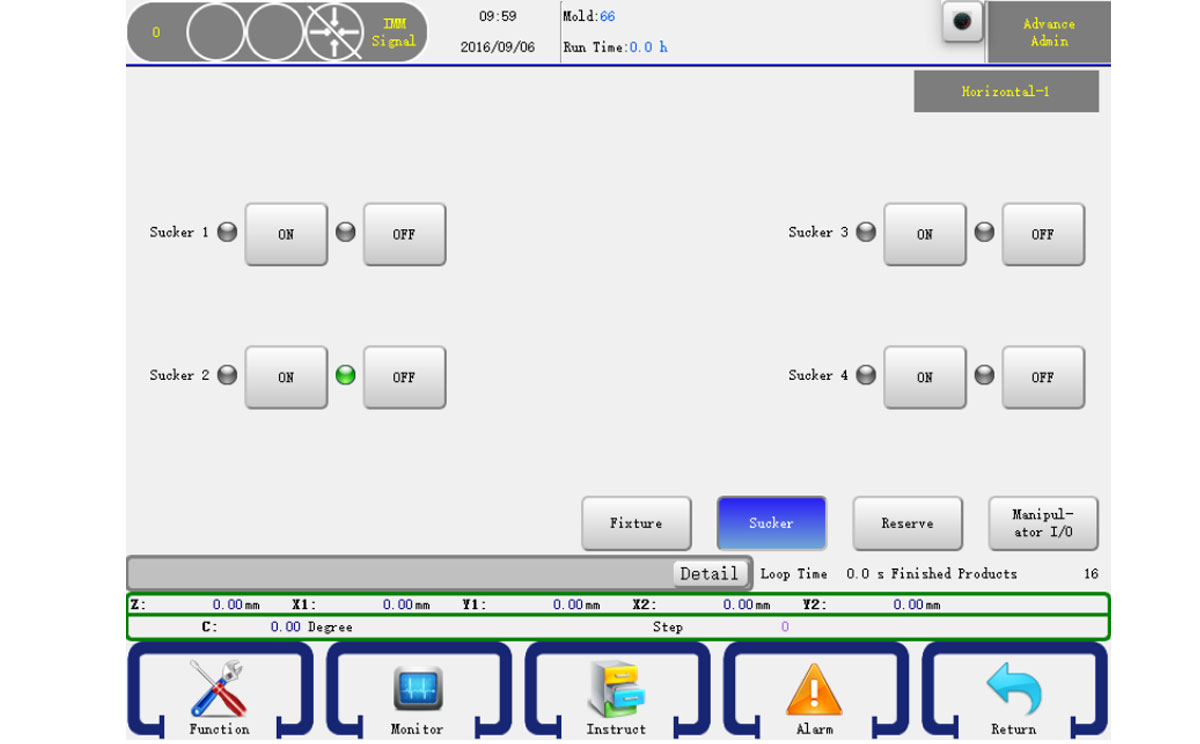
Ci sono quattro ventose. Premi il pulsante ON per accenderlo e premi il pulsante OFF per spegnerlo.
Attenzione: il segnale di ingresso è rosso e quello di uscita è verde. L'indicatore di ingresso o di uscita è spento in assenza di segnale.
5.2.4 Azione ausiliaria
Nella pagina del manuale, fare clic sul pulsante Altro in basso a destra per accedere all'altra pagina del manuale, come mostrato di seguito:
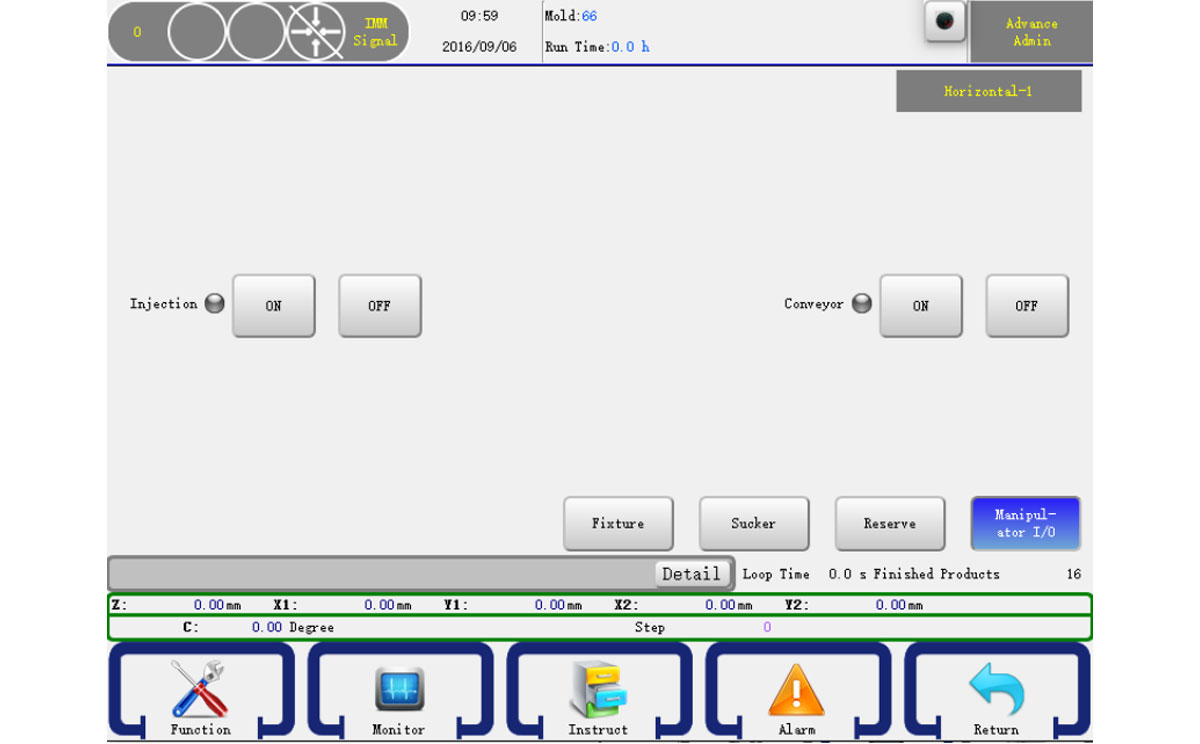
Il funzionamento è lo stesso di Fixture
5.2.5 Azione di riserva
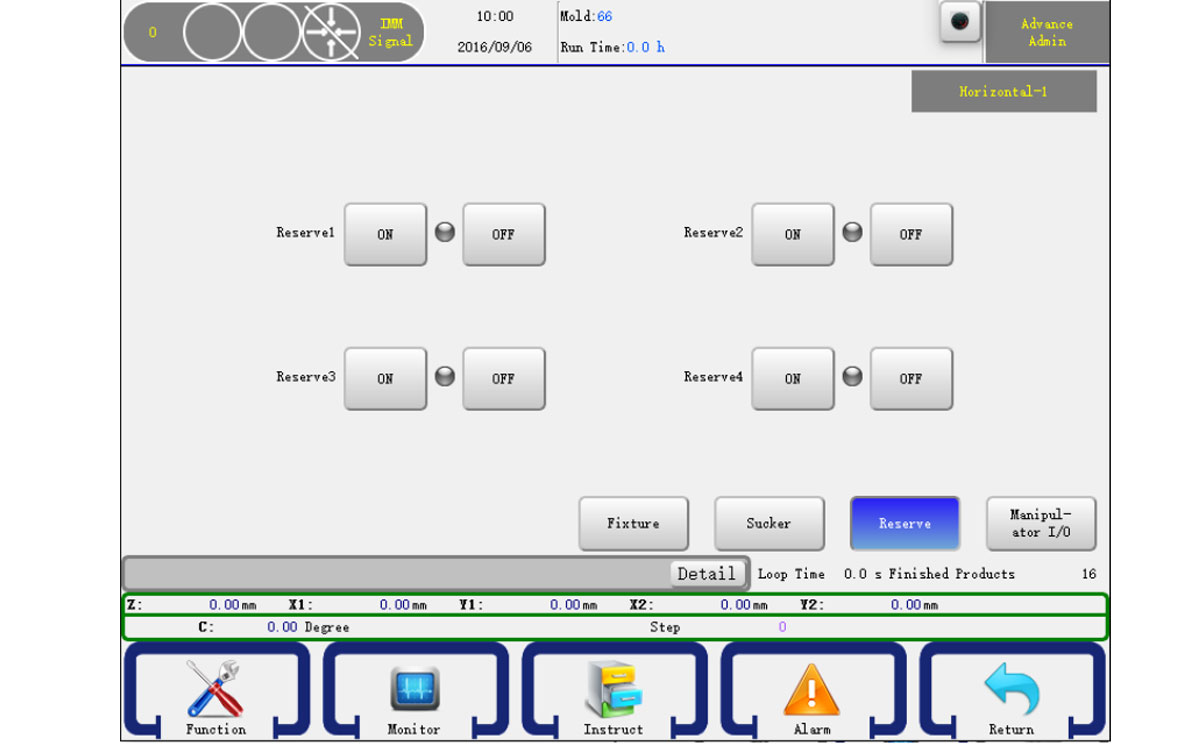
Il funzionamento è lo stesso di Fixture
5.3.1 Monitorare lo stato di esecuzione automatica
Ruotare la manopola verso destra per accedere alla pagina di esecuzione automatica. Il robot passerà allo stato Auto Ready. In questo stato, premere il pulsante di avvio per far passare il robot allo stato Auto Running. È possibile monitorare lo stato di esecuzione, come mostrato di seguito.
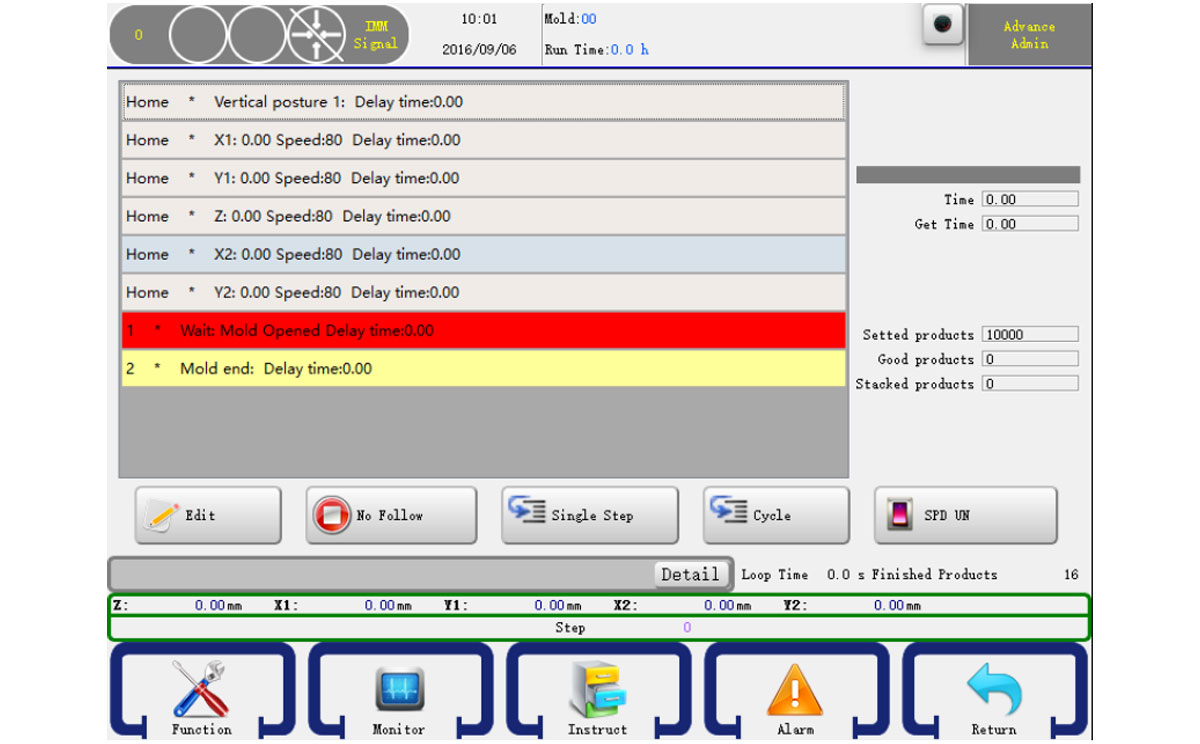
5.3.2 Regolare le configurazioni di esecuzione
Nello stato di esecuzione automatica, è possibile modificare l'azione delle configurazioni del programma. Basta selezionare un passaggio e quindi fare clic sul pulsante "Modifica". Verrà visualizzata una finestra di dialogo di modifica. Dopo aver fatto clic su "OK", i dati verranno accettati e nel ciclo successivo verranno eseguiti in base alle impostazioni. Premendo "Annulla" si annulla l'operazione.
Per garantire che queste impostazioni non danneggino il robot, la macchina o lo stampo, è consentito un intervallo di 5 mm. Come mostrato di seguito:
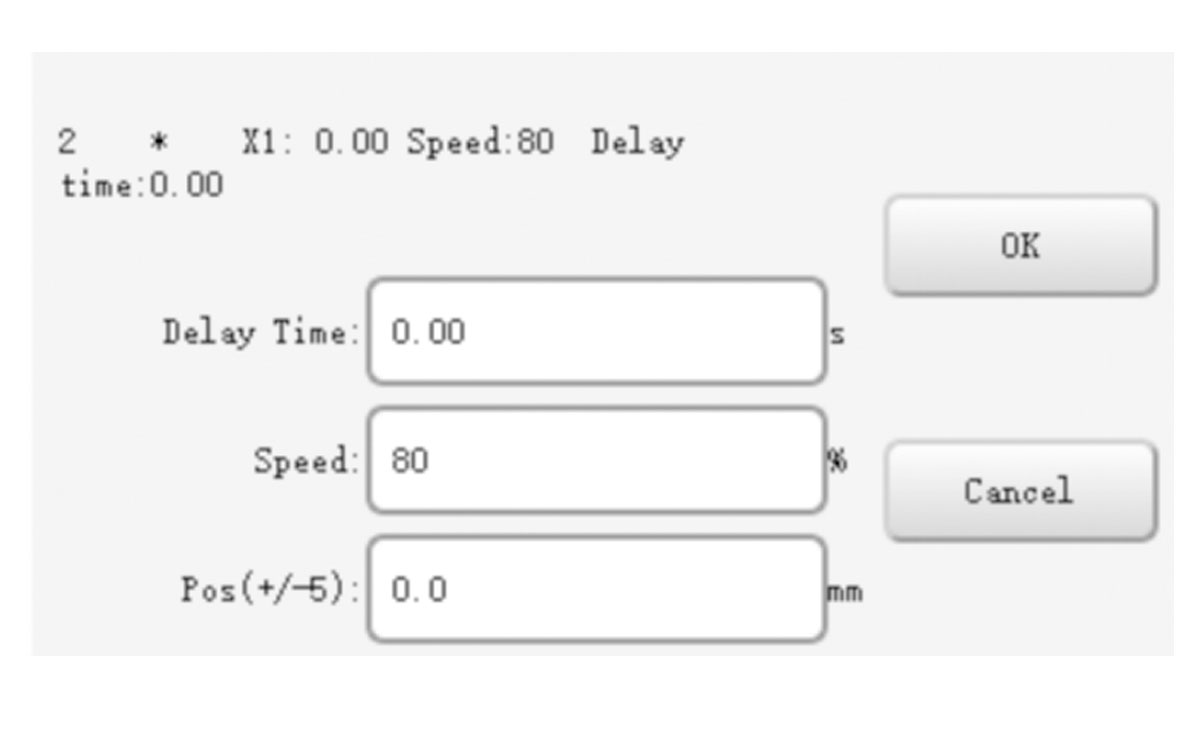
Una volta terminato, fai clic sul pulsante OK per confermare la modifica.
5.3.3 Corsa a passo singolo
Nello stato di esecuzione automatica, è possibile fare clic sul singolo pulsante per eseguire un passaggio. Un nuovo clic eseguirà il passaggio successivo, e così via. Questa funzione è molto utile durante il debug del programma.
5.3.4 Regolazione della velocità
Clicca sul "Pulsante Velocità" in modo che diventi "Visualizzazione velocità" per regolare la velocità complessiva premendo "Regolazione velocità" sulla tastiera e sul pannello nell'angolo in basso a sinistra.
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right








