
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Il funzionamento dei bracci robotici è il risultato della cooperazione tra il sistema di controllo e la struttura meccanica, mentre la scheda elettronica è il tramite tra il sistema di controllo e la struttura meccanica dei bracci robotici. In questo capitolo discuteremo la definizione delle porte delle schede installate nei bracci robotici.
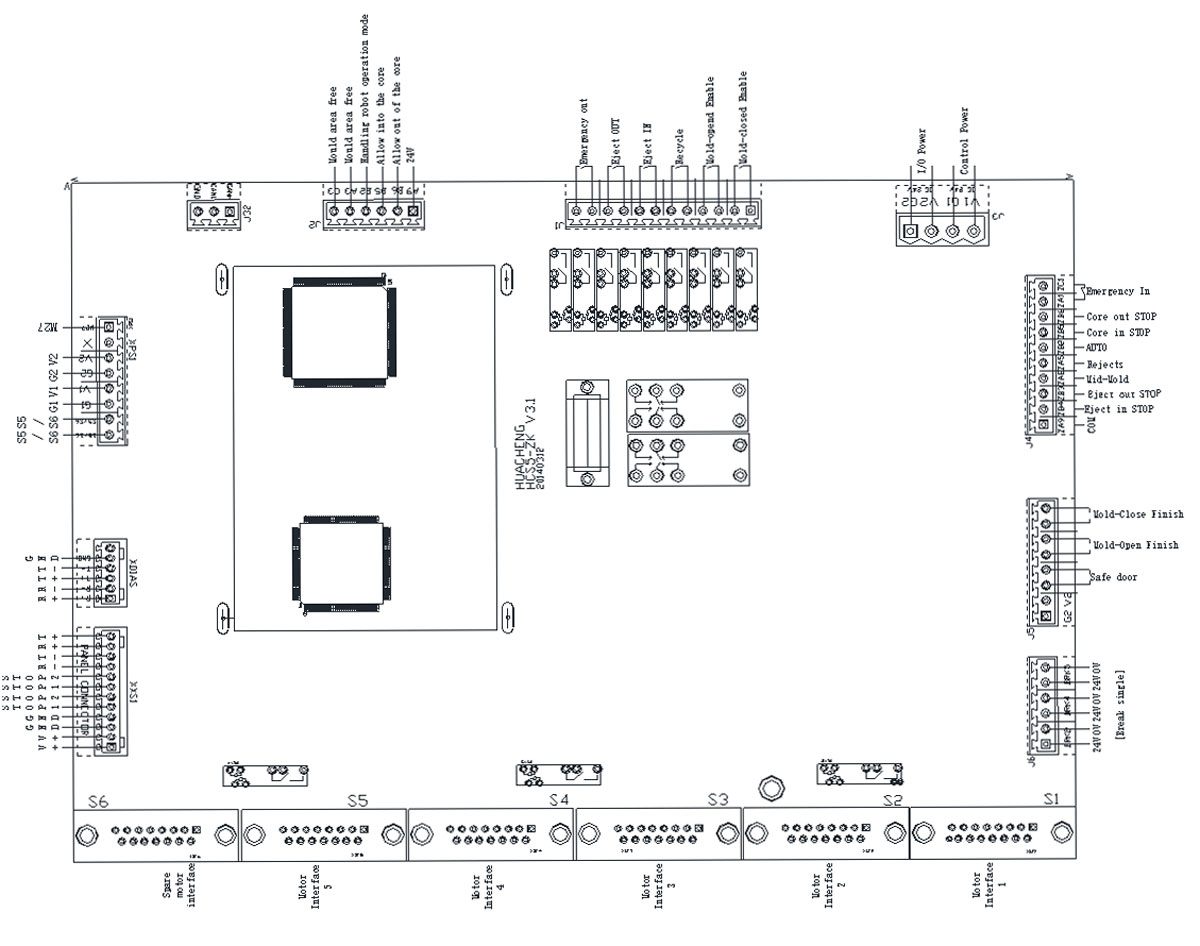
Il disegno sopra mostra la definizione delle porte della scheda madre dei bracci robotici a iniezione servo a 5 assi SWITEK.
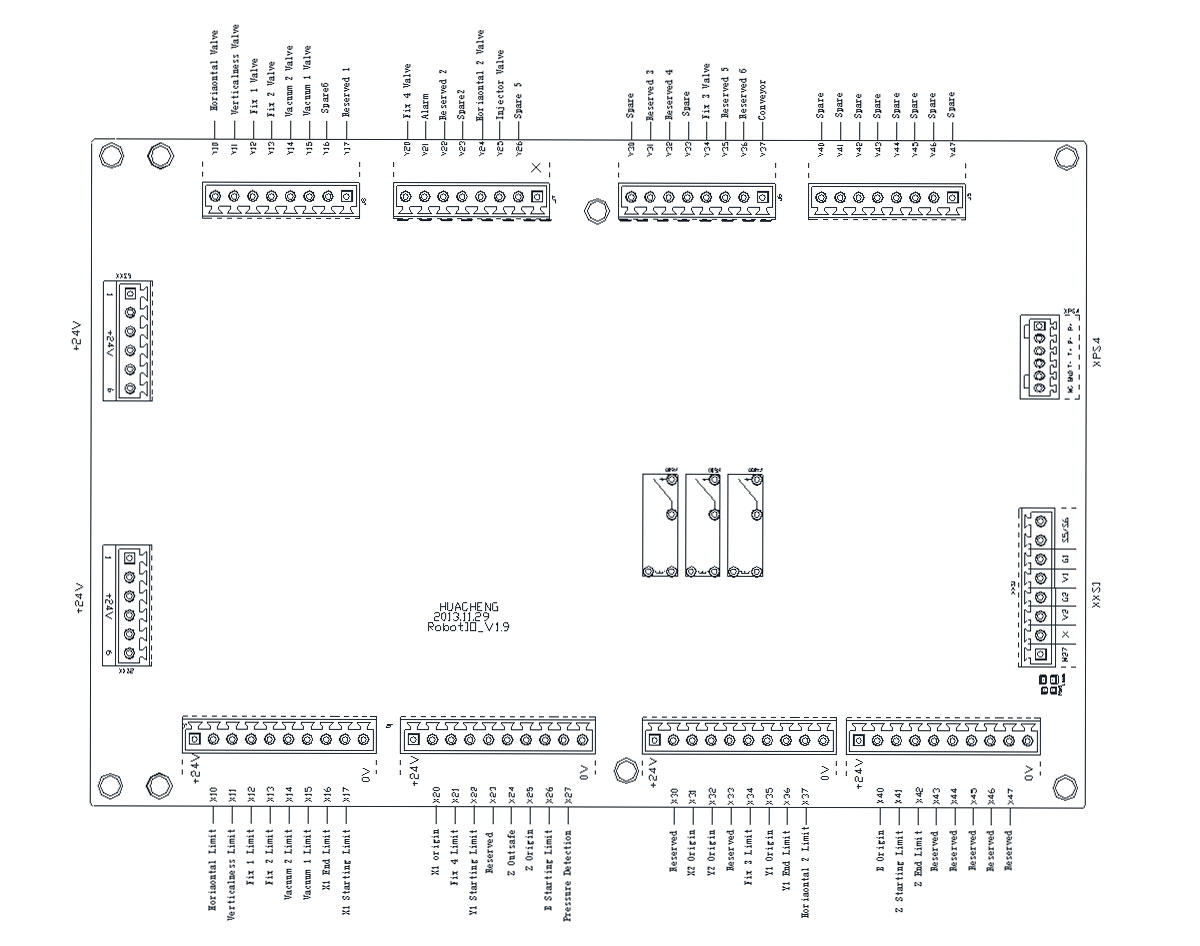
Il disegno sopra mostra la definizione delle porte della scheda I/O dei bracci robotici a iniezione servoassistita SWITEK a 5 assi.
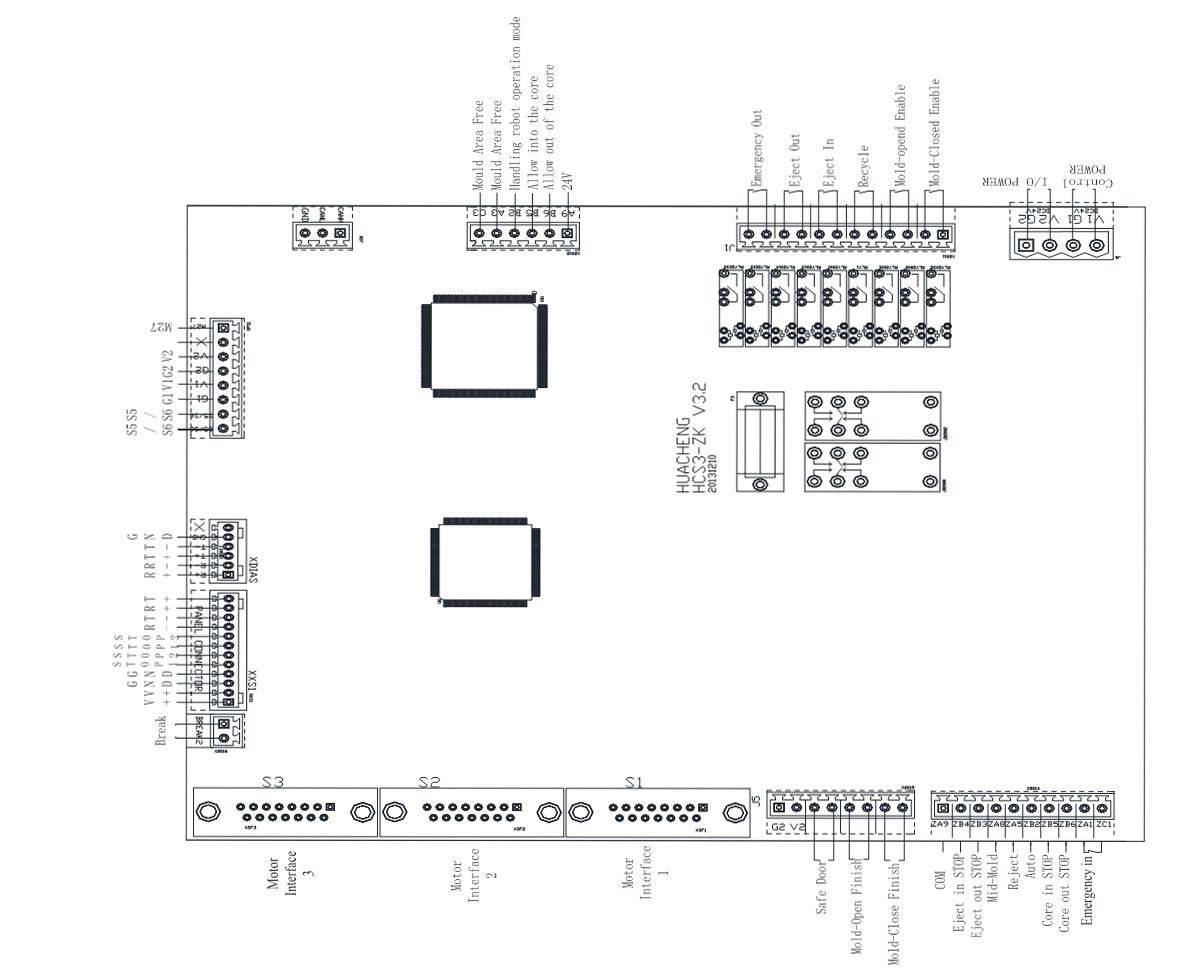
Il disegno sopra mostra la definizione delle porte della scheda madre dei bracci robotici a iniezione servo a 3 assi SWITEK.
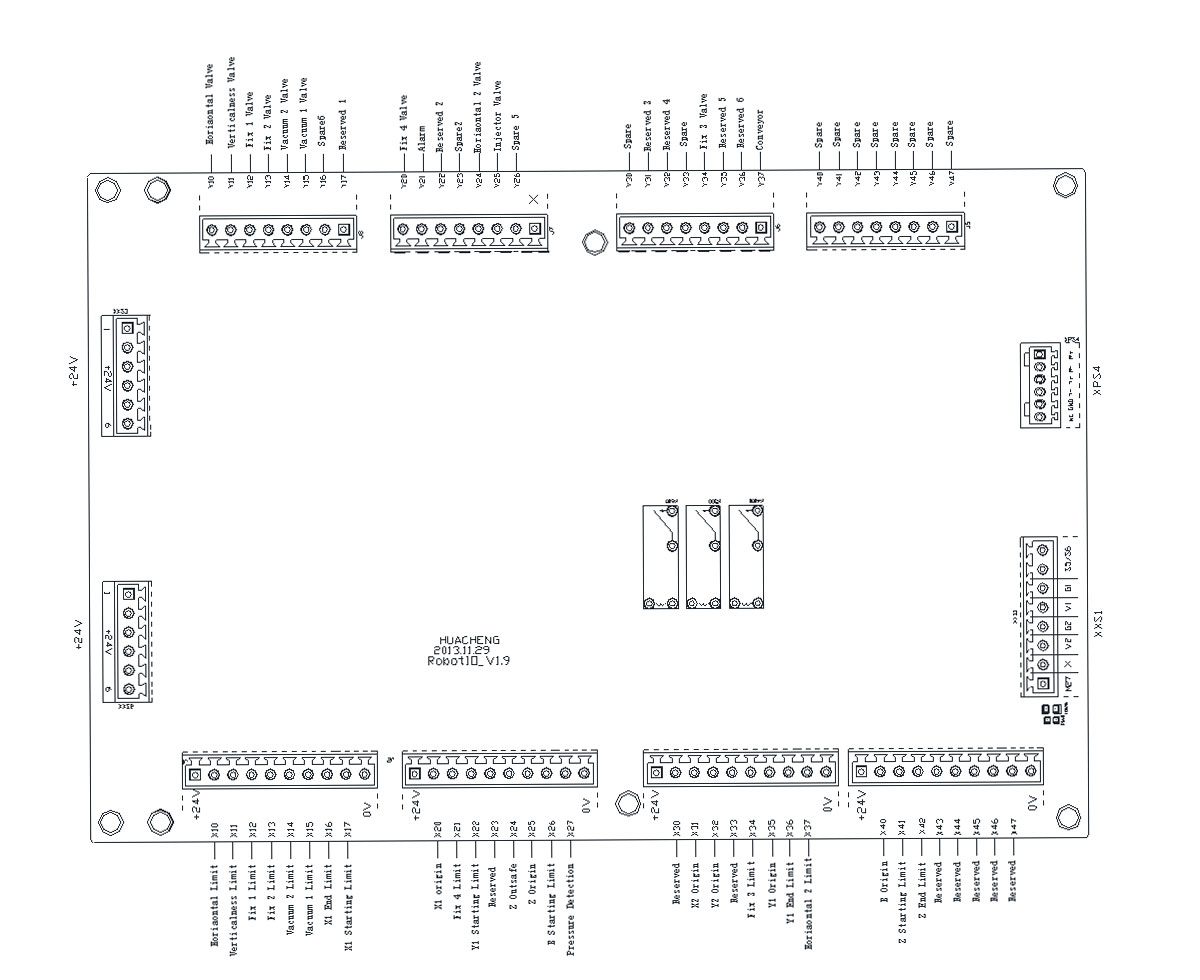
Il disegno sopra mostra la definizione delle porte della scheda I/O dei bracci robotici a iniezione servo a 3 assi SWITEK.
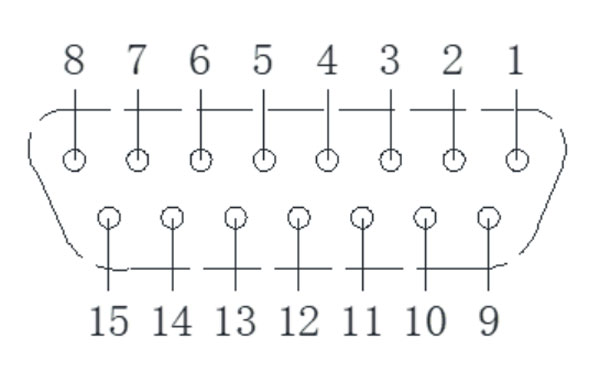
| Numero pin | Definizione del terminale | Numero pin | Definizione del terminale |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







