
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
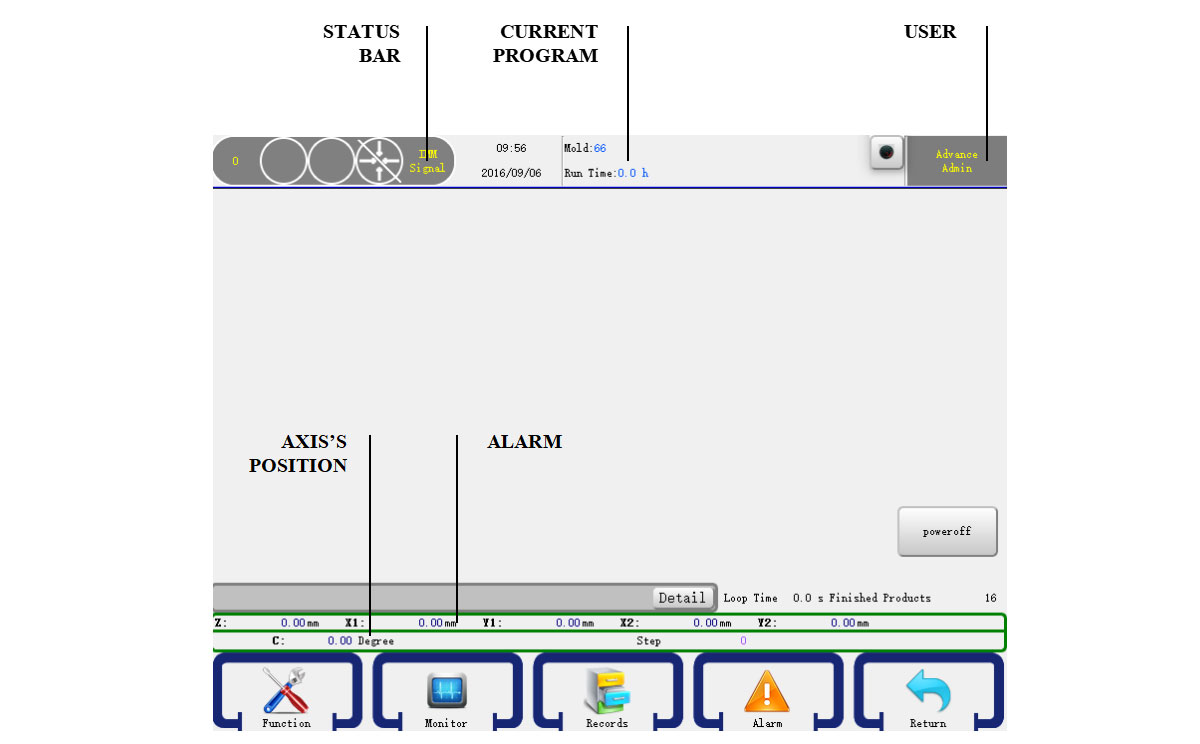
Il pannello operativo è l'interfaccia tramite la quale l'operatore comunica con il braccio robotico. Permette all'operatore di avviare, arrestare, programmare e regolare la velocità di ciascun asse del braccio robotico. In questo capitolo, forniremo una breve introduzione al pannello operativo del controller del braccio robotico (HMI).
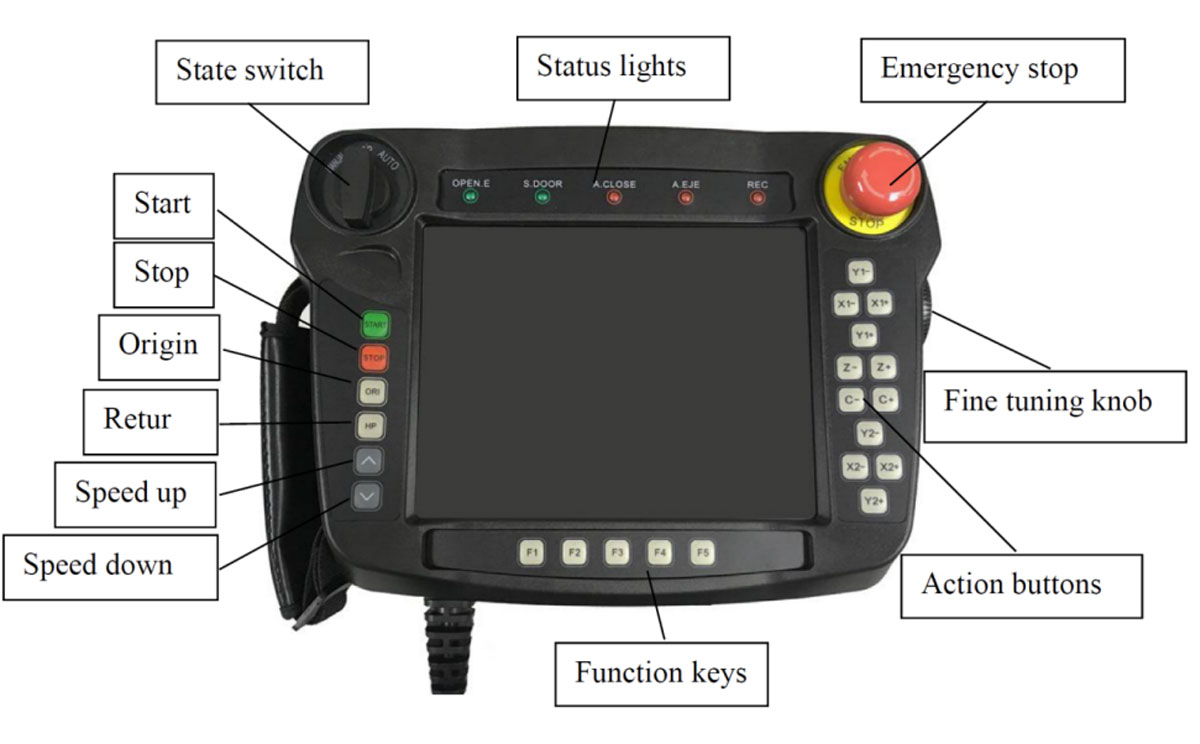
In caso di emergenza, arrestare immediatamente il robot e le altre macchine.
Per una regolazione precisa della distanza, è necessario un leggero movimento delle pennellate.
Spostare l'asse manualmente
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right








