
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Parole chiave:Robot IML; Funzionamento del robot IML; Robotica per l'etichettatura nello stampo
Il "Monitor" di cui stiamo parlando qui è dove avrete una chiara comprensione del funzionamento del braccio robotico. Nella pagina del monitor potete controllare il segnale del braccio robotico, dell'EOAT, della macchina per stampaggio a iniezione e lo stato di funzionamento del servomotore e del sistema di controllo del robot IML per una rapida diagnosi del punto di rottura del sistema.
Cliccando sull'icona  , si aprirà la seguente pagina: la pagina di monitoraggio:
, si aprirà la seguente pagina: la pagina di monitoraggio:

| NO | Nome | Funzione |
|---|---|---|
| (1) | Robot/Jig/IMM | IO visualizza la categoria, clicca per passare rapidamente alla pagina del segnale corrispondente. |
| (2) | Pagina | Fare clic per passare alla pagina I/O |
| (3) | Display IO | Visualizzazione ON/OFF in tempo reale di tutti i punti di ingresso e uscita correnti. |
| (4) | Monitoraggio dell'unità | Visualizzazione in tempo reale di velocità, coppia, carico e deviazione di ciascun servomotore dell'asse. |
| (5) | Monitoraggio interno | Visualizzazione in tempo reale dello stato I/O interno. |
Utilizzare (1) o (2) per commutare il display IO e la luce anteriore si accende per indicare che il segnale è attivo.
3.5.2 Monitoraggio dell'unità
Valori in tempo reale
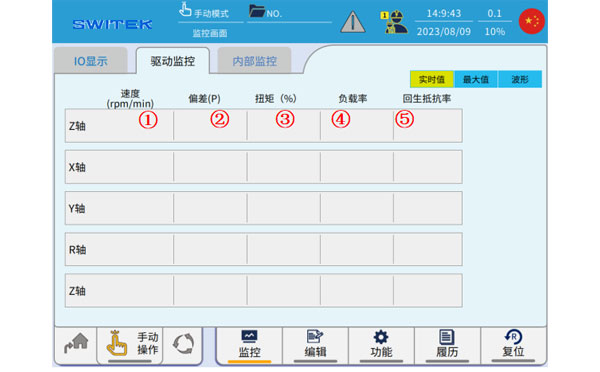
| NO | Nome | Funzione |
|---|---|---|
| (1) | Velocità (giri/min) | Visualizzazione in tempo reale della velocità di rotazione di ciascun asse. |
| (2) | Deviazione (P) | Visualizzazione in tempo reale delle deviazioni su ciascun asse. |
| (3) | Coppia (%) | Visualizzazione percentuale in tempo reale della coppia per ciascun asse. La coppia istantanea del servomotore può raggiungere fino al 300% della coppia nominale. |
| (4) | Fattore di carico | Visualizzazione in tempo reale del fattore di carico operativo di ciascun asse. (100% max) |
| (5) | Tasso di resistenza alla resilienza | Visualizzazione in tempo reale del tasso di carico della resistenza alla rigenerazione. |
Massimo

| NO | Nome | Funzione |
|---|---|---|
| (1) | Velocità massima in avanti | Registrazione della velocità massima di ciascun asse mentre si muove nella direzione positiva. |
| (2) | Velocità massima negativa | Registrazione della velocità massima di ciascun asse che si muove in direzione negativa. |
| (3) | Deviazione massima positiva | Registra la deviazione massima di ciascun asse nella direzione positiva. |
| (4) | Deviazione massima negativa | Registrazione della deviazione massima di ciascun asse nella direzione negativa. |
| (5) | Coppia massima in avanti | Registrazione della coppia massima di ciascun asse mentre si muove nella direzione positiva. |
| (6) | Coppia massima negativa | Registrazione della coppia massima di ciascun asse quando si muove in direzione negativa. |
| (7) | Reset | Il valore massimo registrato in precedenza viene cancellato. |
Forma d'onda
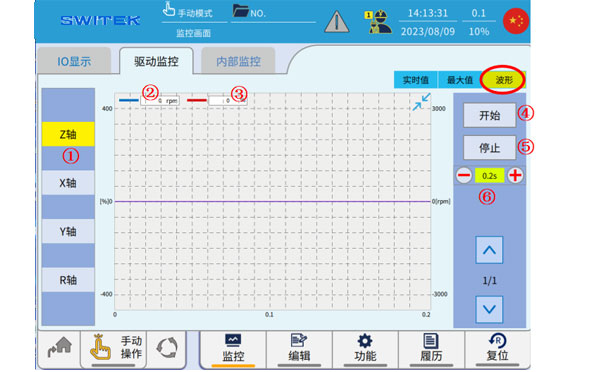
| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione dell'asse | Fare clic per selezionare l'asse da visualizzare. |
| (2) | Coppia (%) | La curva blu mostra la variazione di coppia. La coppia istantanea del servomotore può raggiungere fino al 300% della coppia nominale. |
| (3) | Velocità (giri/min) | La curva rossa della forma d'onda mostra la variazione di velocità. |
| (4) | Inizio | Dopo aver selezionato l'asse (1), fare clic su "Avvia" per avviare il campionamento della forma d'onda. |
| (5) | Fermare | Interrompere il campionamento della forma d'onda |
| (6) | La forma d'onda mostra la scala. | Fare clic su "+" e "-" per ingrandire o ridurre la forma d'onda visualizzata. |
3.5.3 Monitor interno
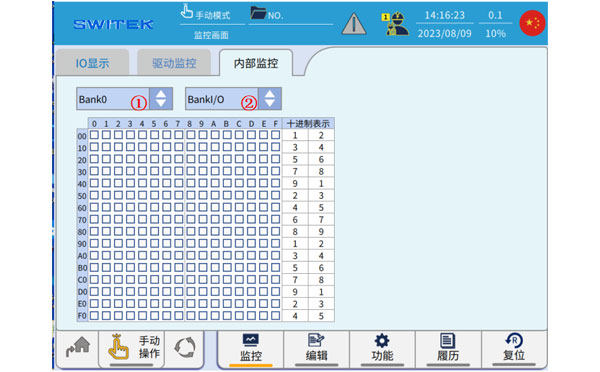
Il "monitoraggio interno" si riferisce al monitoraggio dell'accensione/spegnimento della posizione del flag interno del controller, che è suddiviso in 5 unità vuote *2 , per un totale di 10 aree, e la commutazione tra banco e unità viene completata tramite (1) e (2).
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







