
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Parole chiave:Robot IML; Funzionamento del robot IML; Robotica per l'etichettatura nello stampo
La pagina "Teaching" è dove puoi rivedere e modificare il programma del robot IML. Trattandosi di un sistema di controllo modulare, dopo aver selezionato la modalità, impostato i parametri, impostato il timer e impostato il contatore, otterrai un programma iniziale per il tuo progetto IML. Nella pagina "Teaching" puoi apportare alcune piccole modifiche al programma per rendere il robot IML più efficiente.
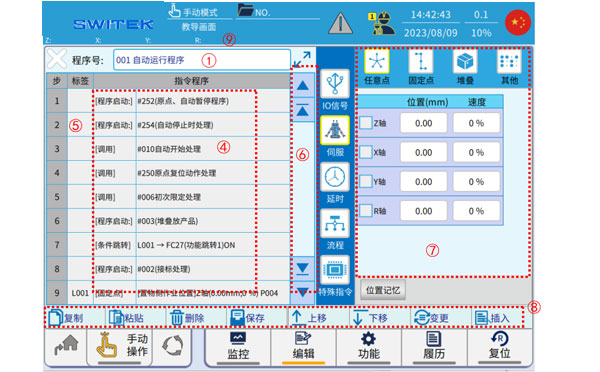
Descrizione di ciascuna area di marcatura:
| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione/Visualizzazione del programma | Fare clic sul pop-up "Elenco programmi", selezionare il numero del programma che si desidera aggiungere, modificare o visualizzare e fare clic per accedere all'interfaccia di modifica. |
| (2) | Program extension display | Cliccando su  , si accede all'interfaccia estesa del display del programma per una facile osservazione del contenuto completo del comando. , si accede all'interfaccia estesa del display del programma per una facile osservazione del contenuto completo del comando. |
| (3) | Ritorno | Fare clic per uscire dall'interfaccia di modifica del tutorial; se il programma è stato modificato, verrà richiesto di compilarlo. |
| (4) | Contenuto delle istruzioni | Viene visualizzato il contenuto del comando. |
| (5) | Colonna etichetta | Passa all'area di modifica della scheda. Fai clic per aggiungere un'etichetta prima della riga di comando (quando crei una nuova etichetta, puoi fare clic su "EN" senza inserire un numero e verrà aggiunto automaticamente un numero di etichetta non utilizzato). |
| (6) | Un elenco di istruzioni di primo livello |
|
| (7) | Elenco secondario dei comandi e impostazioni dei parametri | Modifica dei comandi delle sottoliste e impostazione dei parametri. |
| (8) | Scorciatoie per la modifica dei comandi |
|
| (9) | Visualizzazione della posizione dell'asse | Per una facile osservazione viene visualizzata la posizione attuale di ciascun asse. |
Di seguito i dettagli su come "insegnare" un programma robot IML:
Fare clic sull'area di visualizzazione del nome del programma per accedere all'elenco dei programmi.
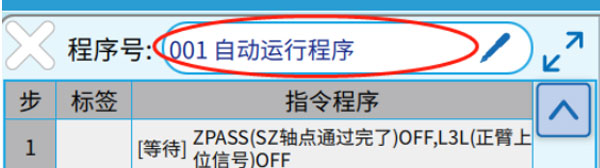
L'interfaccia è la seguente:
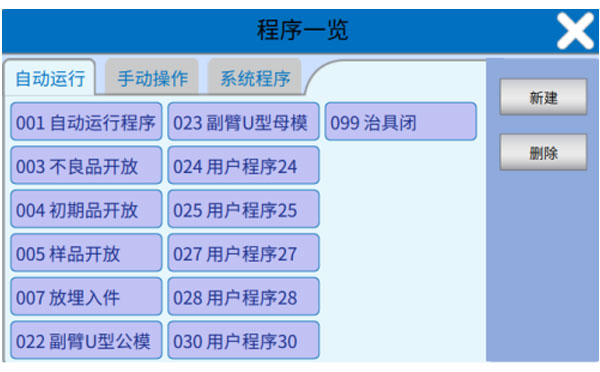
Autorun (001-099): 001 è il programma principale che può essere modificato dall'utente, 024-083 sono subroutine create e modificate dall'utente.
Funzionamento manuale (#178-#249):
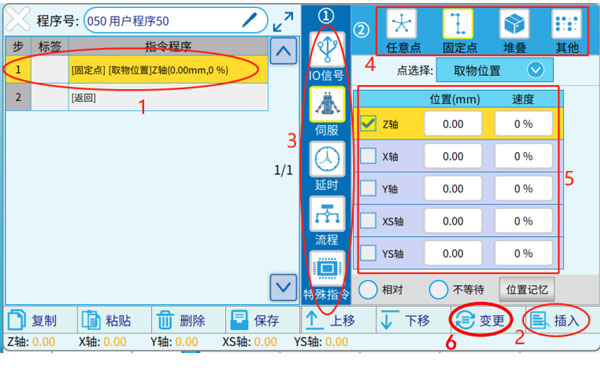
L'interfaccia di modifica è quella mostrata nella figura sopra e la nuova riga di comando è suddivisa nei seguenti 6 passaggi:
Di seguito sono riportati alcuni dei comandi più comunemente utilizzati:
Durante l'insegnamento della programmazione applicativa, si sconsiglia agli utenti di modificare la logica di base dei punti X e Y per il controllo IO standard della macchina per stampaggio a iniezione e del manipolatore (in questo caso, Robot IML), ma di chiamare la subroutine funzionale del sistema per garantire l'accuratezza del programma. Queste subroutine sono inserite nella classe "Segnali IO".
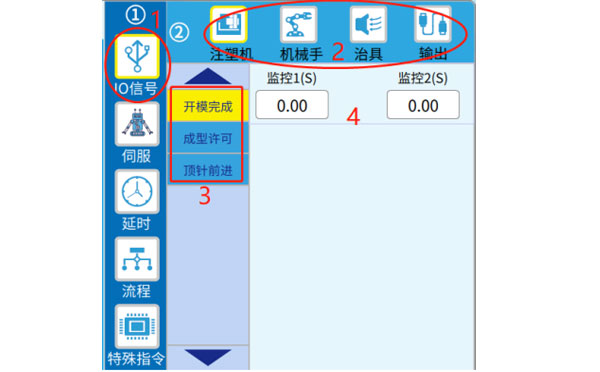
Come mostrato nella figura sopra, i passaggi di programmazione vengono impostati passo dopo passo in base a 1 (Categoria principale), 2 (Sottocategoria), 3 (Istruzioni specifiche) e 4 (Parametri specifici); al termine, fare clic su "Modifica" o "Inserisci".
Quando si modificano le funzioni di utilità relative al robot IML, è possibile utilizzare i pulsanti nella figura seguente per azionare le maschere relative al robot IML (è possibile osservare l'attivazione/disattivazione del segnale di rilevamento attivando o disattivando il punto a destra).  ), è utile programmare simulazioni in scenari operativi reali.
), è utile programmare simulazioni in scenari operativi reali.

Per modificare la logica di uscita del punto I/O, l'interfaccia di modifica è la seguente:
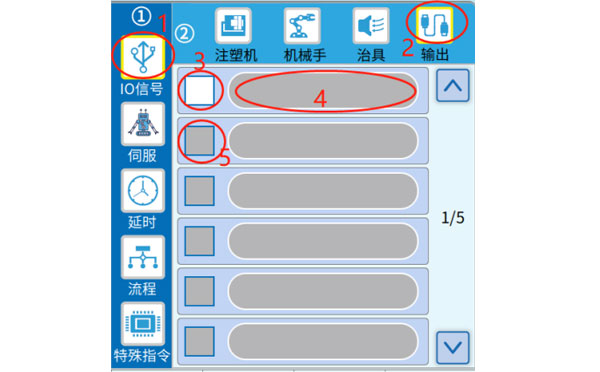
Nell'interfaccia di modifica della figura sopra, fare clic sull'etichetta numero 3 per √, il segno 4 diventa modificabile, selezionare il punto Y da visualizzare e confermare. Se si desidera visualizzare contemporaneamente i punti Y del robot IML, al designatore 5, √ per iniziare a modificare l'output del secondo punto Y. Al termine, fare clic su "Modifica" o "Inserisci".
Modifica i comandi di movimento del servoasse, incluso lo spostamento verso un punto fisso (il punto è definito, può essere modificato in "Impostazione posizione" e può essere referenziato), un punto qualsiasi, un punto impilato (la posizione è impostata in "Stack" nel menu) e il comando di ritorno dell'asse all'origine, ecc. Prendiamo come esempio un punto fisso:
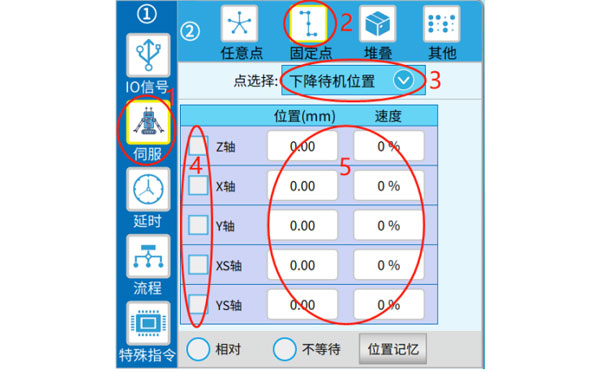
Come mostrato nella figura sopra, seleziona il punto specifico all'etichetta 3, quindi seleziona l'asse da eseguire all'etichetta 4 e imposta il punto e la velocità all'etichetta 5. Al termine, fai clic su "Modifica" o "Inserisci".
Esistono due tipi di comandi di modifica del ritardo: specificare l'ora e specificare il timer (l'ora del timer può essere modificata quando viene eseguita automaticamente).
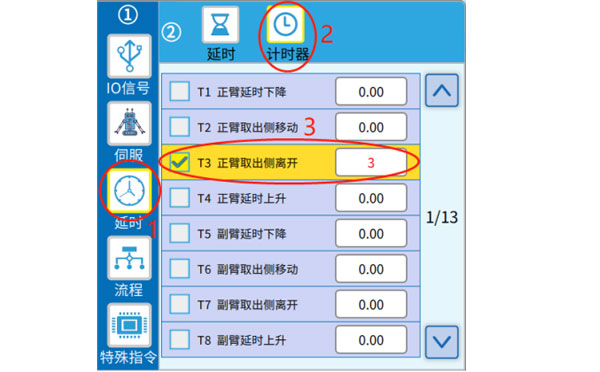
Nota: se si desidera utilizzare un timer durante l'insegnamento della programmazione, si consiglia di utilizzare i modelli T85-T100, che sono timer utente non specificatamente definiti.
L'invocazione e l'avvio del programma sono entrambi modi di utilizzare le subroutine. La differenza è che quando una subroutine viene chiamata, attende il termine dell'esecuzione dell'istruzione nella subroutine (fino all'istruzione "return"), e la chiamata è considerata completa, e l'istruzione successiva può essere eseguita nel programma principale. D'altra parte, non è necessario attendere l'esecuzione del sottoprogramma di avvio ed è possibile avviare direttamente il passo successivo del programma principale (il programma principale e il sottoprogramma vengono eseguiti in parallelo).
I passaggi per modificare il comando di avvio del programma sono i seguenti:
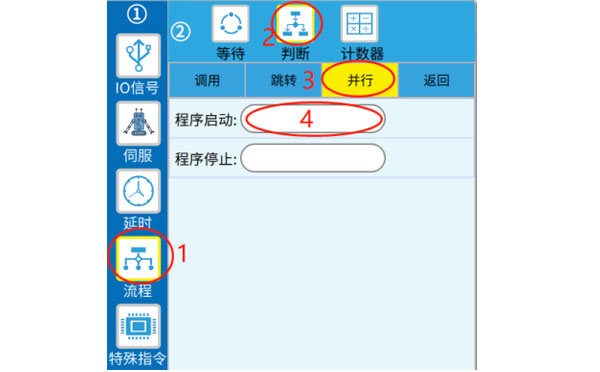
Nota: il programma avvia il sottoprogramma aperto, che può essere chiuso tramite "Arresto programma" sopra indicato (in circostanze normali, il sottoprogramma verrà chiuso automaticamente al termine dell'esecuzione e al raggiungimento dell'istruzione "return").
I passaggi per modificare il comando di invocazione sono i seguenti:
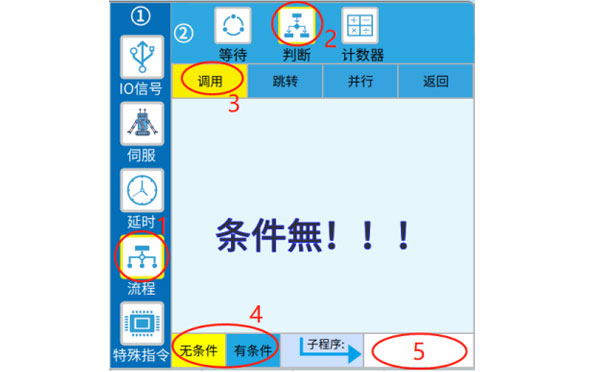
Come mostrato nell'icona numero 4 sopra, quando si modifica l'istruzione di chiamata, è possibile scegliere se impostare la condizione, selezionare "incondizionato" e quindi impostare il numero di subroutine da chiamare al punto 5 per completare la chiamata. Se si seleziona "Condizionale", è necessario prima completare l'impostazione della condizione, quindi impostare il numero di programma a 6 etichette e fare clic su "Modifica" o "Inserisci".
Si noti che quando il giudizio condizionale precedente non è vero, la chiamata successiva non verrà eseguita, ma verrà avviata la riga successiva di istruzioni.
Comando Jump: il programma viene eseguito fino al comando Jump e il passaggio successivo eseguirà la riga di comando con il tag corrispondente, anziché eseguirla nell'ordine successivo.
Salto/salto condizionale, i passaggi per modificare il comando sono i seguenti:

Selezionare se si desidera impostare le condizioni nell'etichetta 4, impostare le condizioni nell'etichetta 5 (è possibile impostare più condizioni), impostare i numeri delle etichette nell'etichetta numero 6 e selezionare "Modifica" o "Inserisci" per generare i comandi. Quindi compilare la colonna delle etichette mostrata nell'etichetta numero 7, prima della riga di comando di destinazione.
Se si utilizza un salto "condizionale", la valutazione della condizione precedente non è valida e il salto successivo non viene eseguito, e la riga di istruzioni successiva verrà avviata direttamente. Se la condizione è vera, eseguire la riga di comando che salta all'etichetta.
L'output del flag interno è ON/OFF e la procedura di modifica è mostrata nel numero dell'icona sottostante.
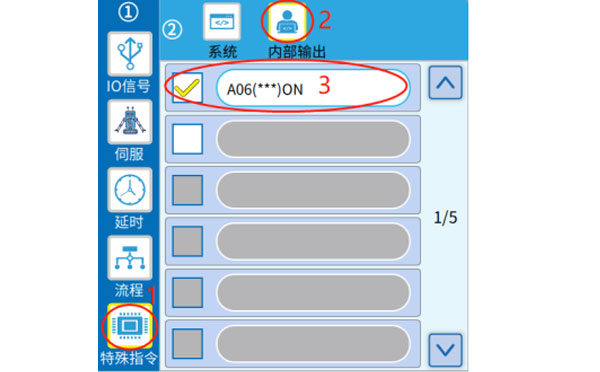
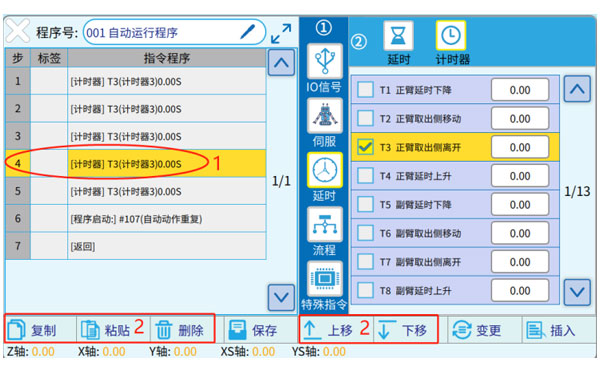
Come mostrato nell'icona numero 1 qui sopra, seleziona la riga di comando che desideri modificare (diventa gialla) e poi usa il pulsante con l'etichetta 2 per eseguire l'operazione.
Le funzioni di ciascun pulsante sono le seguenti:
Una volta modificato il programma, è possibile fare clic su "Salva" o " " oppure passare ad altre pagine di impostazioni per attivare il prompt "Compilazione", fare clic su "Sì" e attendere il completamento della modifica (verrà salvata automaticamente dopo la compilazione).
" oppure passare ad altre pagine di impostazioni per attivare il prompt "Compilazione", fare clic su "Sì" e attendere il completamento della modifica (verrà salvata automaticamente dopo la compilazione).

Impostare l'opzione "Modo" nell'angolo in alto a sinistra del teach pendant su AUTO per accedere all'interfaccia di funzionamento automatico. Accedere all'apprendimento, come mostrato di seguito, e fare clic sull'icona " " mostrata nell'etichetta 1, per accedere alla schermata di visualizzazione estesa. Fare clic sull'etichetta 2 "Passo singolo" per accedere allo stato passo singolo, premere una volta il pulsante dell'etichetta 3 " " e il programma passerà a 1 passo.
" e il programma passerà a 1 passo.
L'avanzamento del programma può essere visualizzato al numero 4: "Program No" è il numero del programma in esecuzione e "Step No" è il numero del programma in esecuzione.

Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







