
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Parole chiave:Robot IML; Funzionamento del robot IML; Robotica per l'etichettatura nello stampo
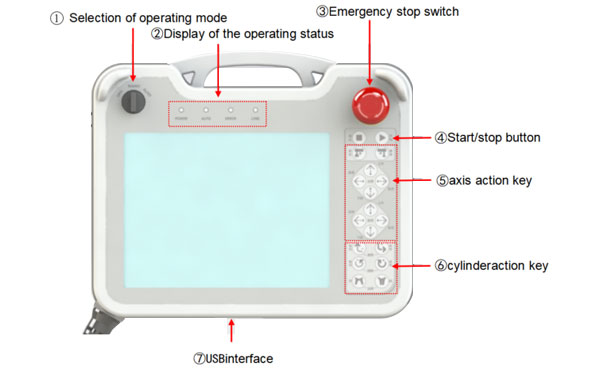
Il pannello di controllo del robot IML fornisce un'interfaccia uomo-macchina (HMI) di facile utilizzo che consente agli operatori del robot IML di avviare il sistema, programmarlo o diagnosticarlo. In questo capitolo vi aiuteremo a comprendere meglio la centralina di controllo del robot IML e le funzioni di ogni componente del pannello.
Lato anteriore:
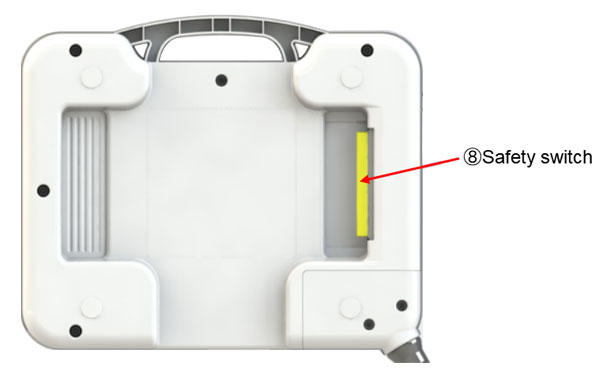
Lato posteriore:
| NO. | Nome | Funzioni |
|---|---|---|
| 1 | Selezione della modalità operativa | Attiva/disattiva la modalità origine/manuale/automatica |
| 2 | Visualizzazione dello stato operativo |
|
| 3 | Interruttore di arresto di emergenza | Arresto di emergenza del robot da asporto. Per rilasciare l'arresto di emergenza, ruotare la chiave in senso orario. |
| 4 | Pulsante di avvio/arresto | Avvia/mette in pausa il funzionamento automatico. |
| 5 | Tasto azione asse | Grazie all'interruttore di sicurezza è possibile spostare i cinque assi in direzione positiva e negativa. |
| 6 | Chiave a cilindro | Con l'interruttore di sicurezza si controlla l'azione del cilindro. |
| 7 | Interfaccia USB | Interfaccia di comunicazione per il caricamento e lo scaricamento dei dati sul teach pendant. |
| 8 | Interruttore di sicurezza | Durante il funzionamento manuale, se si preme questo tasto, è possibile eseguire tutte le azioni dei tasti di azione manuale. |
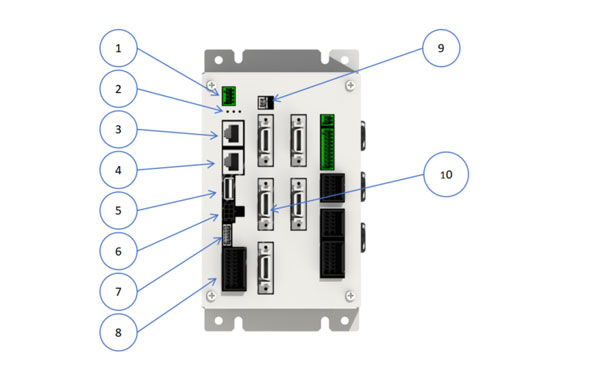
TSM-1000P:
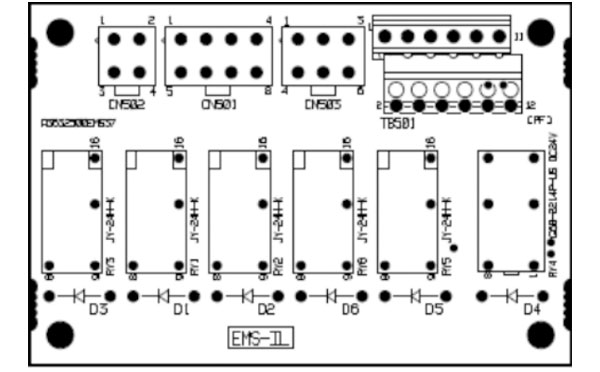
Descrizione dettagliata del cablaggio:
CN501:
| SPILLO | Etichetta | Nome | Nota |
|---|---|---|---|
| 1 | X00 | Segnale di sollevamento del braccio M | Cablaggio a TIO-A |
| 2 | X07 | Segnale di sollevamento del braccio S | Cablaggio a TIO-A (cortocircuito quando triassiale) |
| 3 | X18 | Zona di posizionamento | Cablaggio a TIO-A |
| 4 | 24G | 24G | Nessun cablaggio |
| 5 | 24G | 24G | |
| 6 | 24G | 24G | |
| 7 | 24G | 24G | |
| 8 | 24G | 24G |
CN502:
| SPILLO | Etichetta | Nome | Nota |
|---|---|---|---|
| 1 | RY2 | Uscita relè (non utilizzata) | non utilizzato |
| 2 | 24V | 24V | Collegare l'alimentazione L+ |
| 3 | 24G | 24G | |
| 4 | 24G | 24G | Collegare l'alimentazione L+ |
CN503:
| SPILLO | Etichetta | Nome | Nota |
|---|---|---|---|
| 1 | MP_ON_1 | Servo acceso | Collegare la porta I/O sul controller (MOT) |
| 2 | EMS_1 | Uscita del segnale EMS | |
| 3 | EMS_SW_1 | Ingresso segnale EMS | |
| 4 | MP_ON_2 | Contattore servo acceso | |
| 5 | EMS_2 | Uscita del segnale EMS | |
| 6 | EMS_SW_2 | Ingresso segnale EMS |
TB501:
| SPILLO | Etichetta | Nome | Nota |
|---|---|---|---|
| 1 | EMS OUT1 | Uscita EMS della macchina da asporto 1 | Collegare la linea del cavo 23 (la linea collegata alla macchina per stampaggio a iniezione) |
| 2 | EMS OUT2 | Uscita EMS per macchina da asporto 2 | Collegare la linea del cavo 24 |
| 3 | Y35 | Abilita la chiusura MLD | Collegare il PIN 2 in CN302 sul PIO |
| 4 | Y35 | Abilita la chiusura MLD | Collegare il PIN6 in CN302 sul PIO |
| 5 | Y35 | Abilita la chiusura MLD | Collegare la linea del cavo 10 |
| 6 | Y35 | Abilita la chiusura MLD | Collegare la linea del cavo 11 |
| 7 | EMSIN_1(24V) | Ingresso segnale EMS esterno 1 | Collegare i PIN 7 e PIN 8 quando non si utilizza il segnale di arresto di emergenza esterno. |
| 8 | EMSIN1_1 | Ingresso segnale EMS esterno 1 | |
| 9 | EMSIN1_2 | Ingresso segnale EMS esterno 2 | Collegare il PIN9 e il PIN10 quando non si utilizza il segnale di arresto di emergenza esterno. |
| 10 | EMSIN1_2 | Ingresso segnale EMS esterno 2 | |
| 11 | EMSIN1_3 | Ingresso segnale EMS esterno 3 | Collegare PIN11 e PIN12 quando non si utilizza il segnale di arresto di emergenza esterno |
| 12 | EMSIN1_3 (24G) | Ingresso segnale EMS esterno 3 |
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







