
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
La programmazione di un braccio robotico per una macchina per stampaggio a iniezione non riguarda solo l'impostazione della posizione dell'asse, l'abilitazione/disabilitazione dei cilindri e di altri componenti EOAT, ecc., ma include anche le impostazioni del segnale per consentire al robot di comunicare con la macchina per stampaggio a iniezione, le impostazioni del prodotto, le impostazioni dello stack, la configurazione della macchina, le impostazioni di sistema, le impostazioni dei punti di sicurezza, ecc. In questo capitolo analizzeremo passo dopo passo come configurare questi parametri dei bracci robotici.
Nello stato di arresto, fare clic sulla voce di menu Funzione sulla barra del menu principale per accedere alla pagina di configurazione della funzione. Come mostrato di seguito:
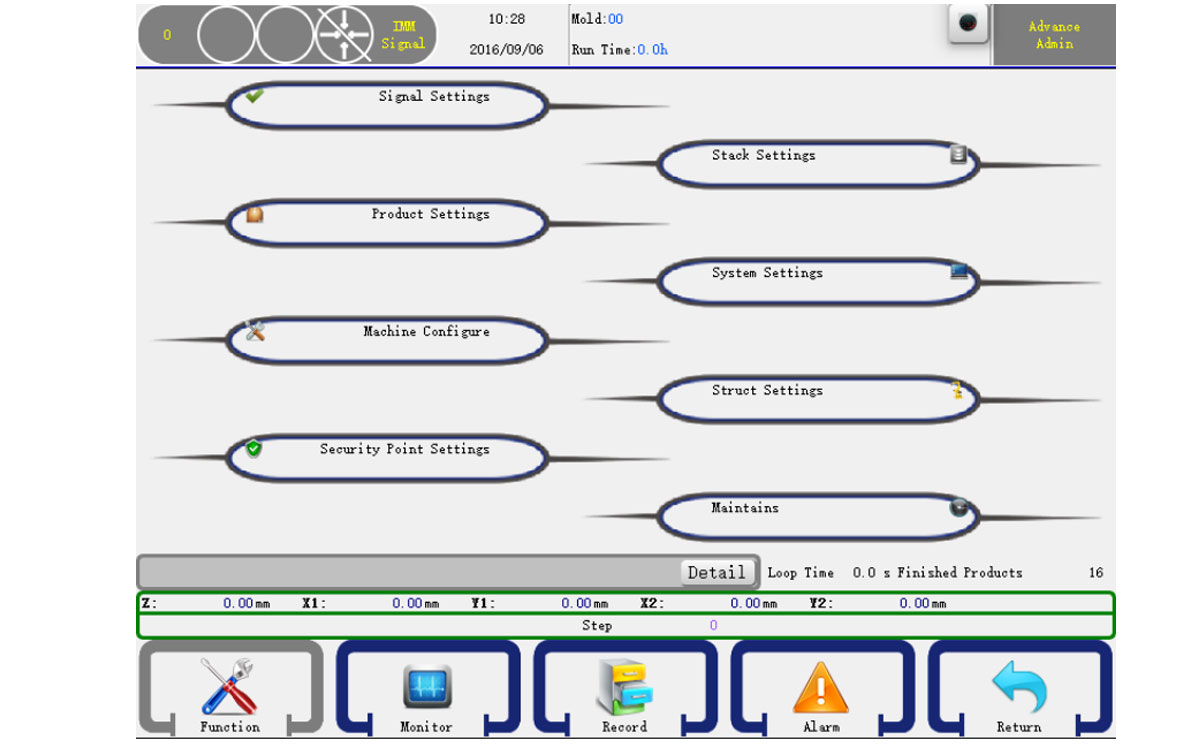
Fare clic sulla voce Impostazioni segnale per accedere alla pagina delle impostazioni del segnale, come mostrato di seguito:

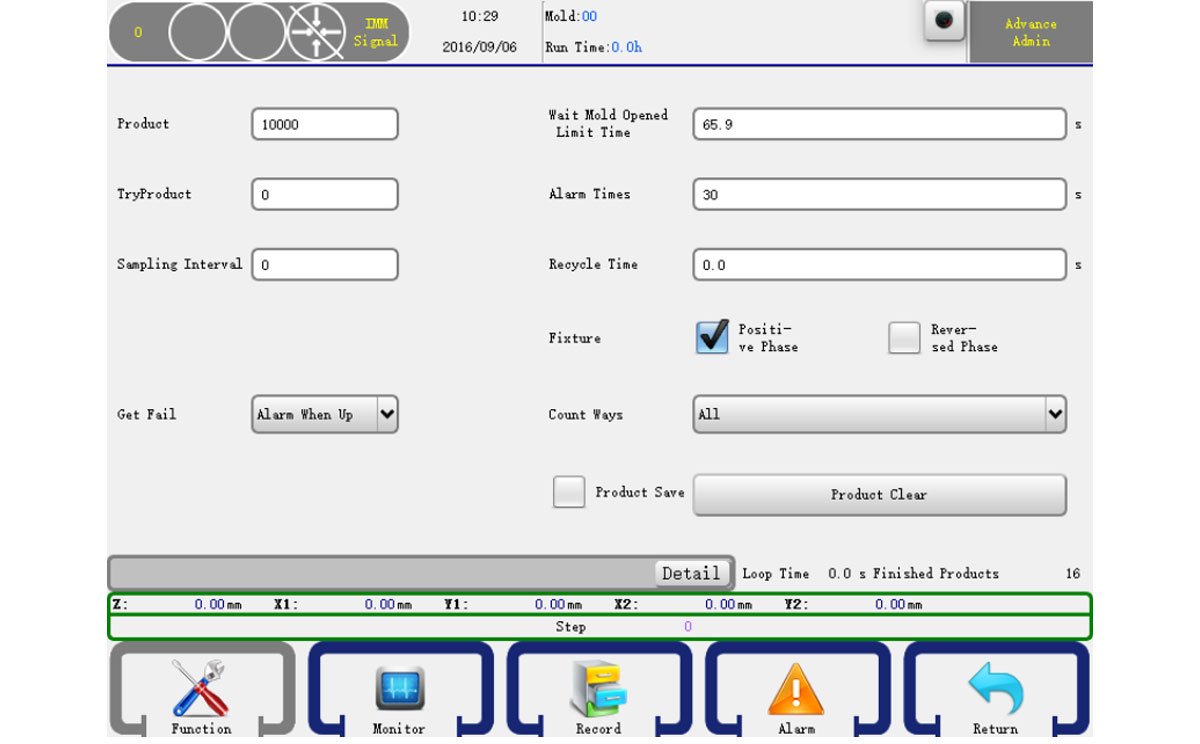
Fare clic sul pulsante Impostazioni prodotto per accedere alla pagina delle impostazioni del prodotto, come mostrato di seguito:
Fare clic sul pulsante Configurazione macchina per accedere alla pagina di configurazione della macchina, come mostrato di seguito:
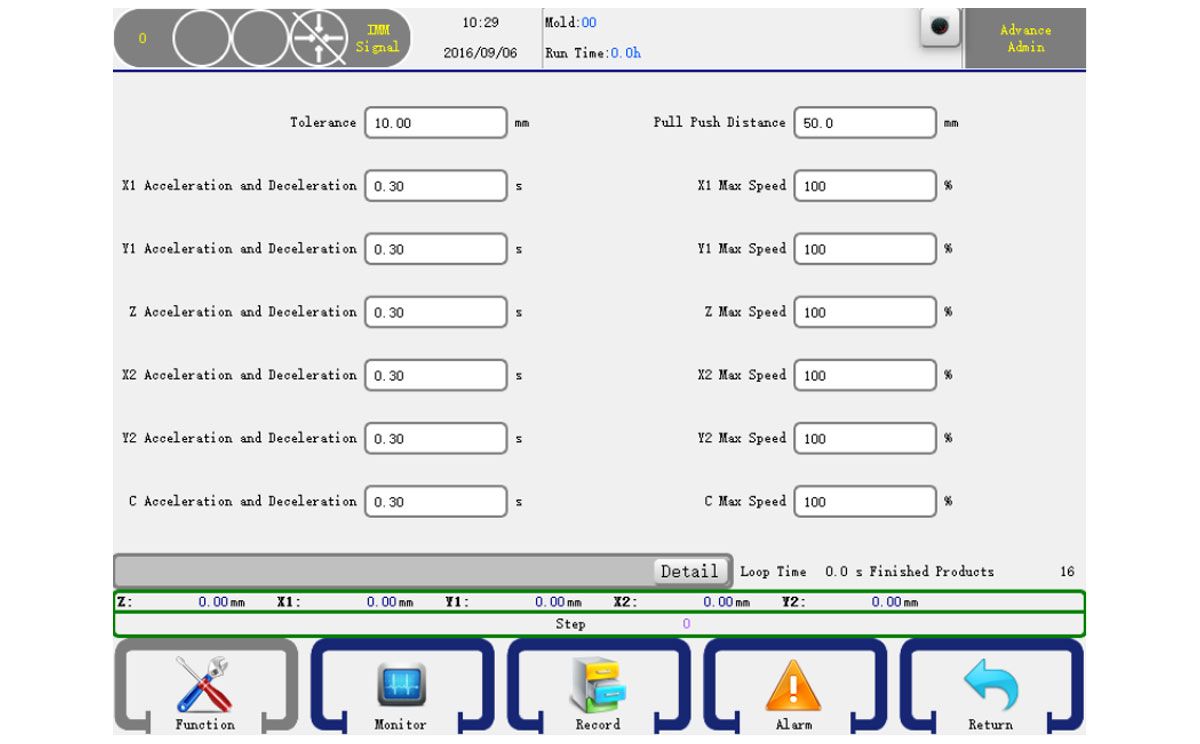
Tolleranza: Tolleranza tra l'impulso inviato e l'impulso di feedback del servo.
Zona di sicurezza: Zona di sicurezza tra i bracci e i sottobracci.
Accelerazione e decelerazione X, Y, Z: Tempo di accelerazione e decelerazione dell'asse servo.
Velocità massima X, Y, Z: Velocità massima dell'asse servo.
Fare clic sul pulsante Impostazioni punto di sicurezza per accedere alla pagina delle impostazioni del punto di sicurezza, come mostrato di seguito:
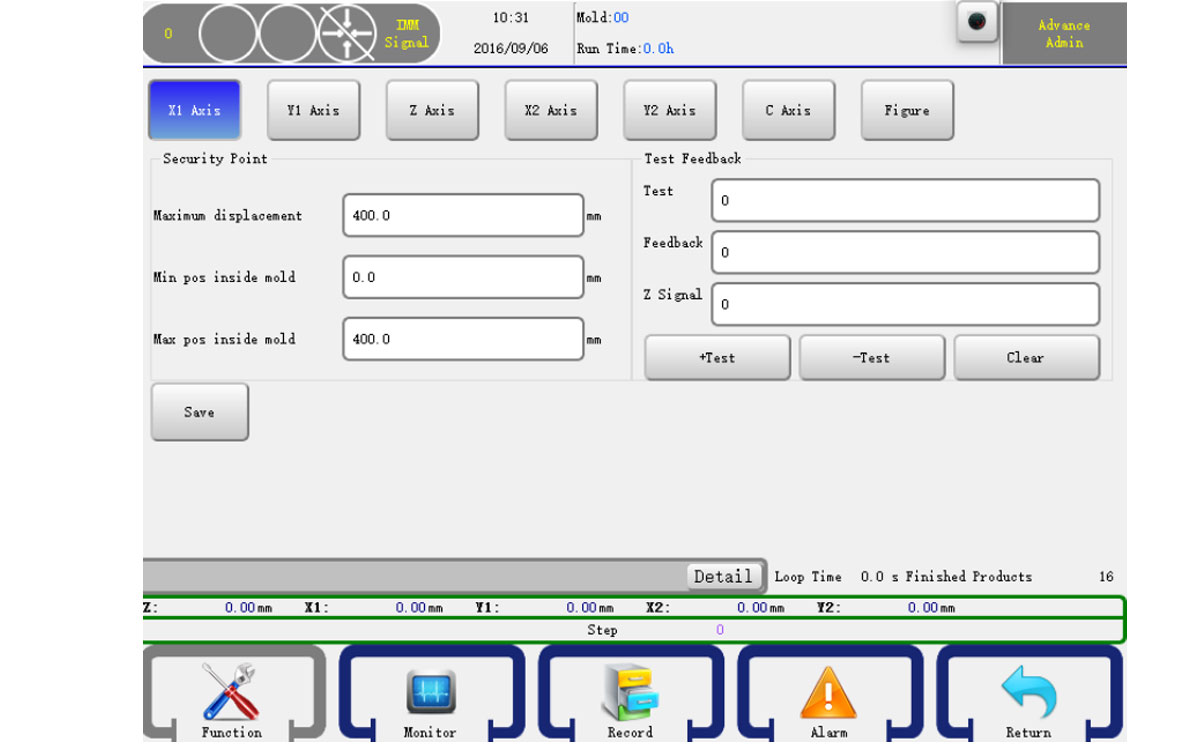
Attenzione: È possibile modificare la posizione minima e massima della X nel campo parametro asse X della pagina dei parametri meccanici.
Fare clic sulla voce Impostazioni stack per accedere alla pagina delle impostazioni stack, come mostrato di seguito:
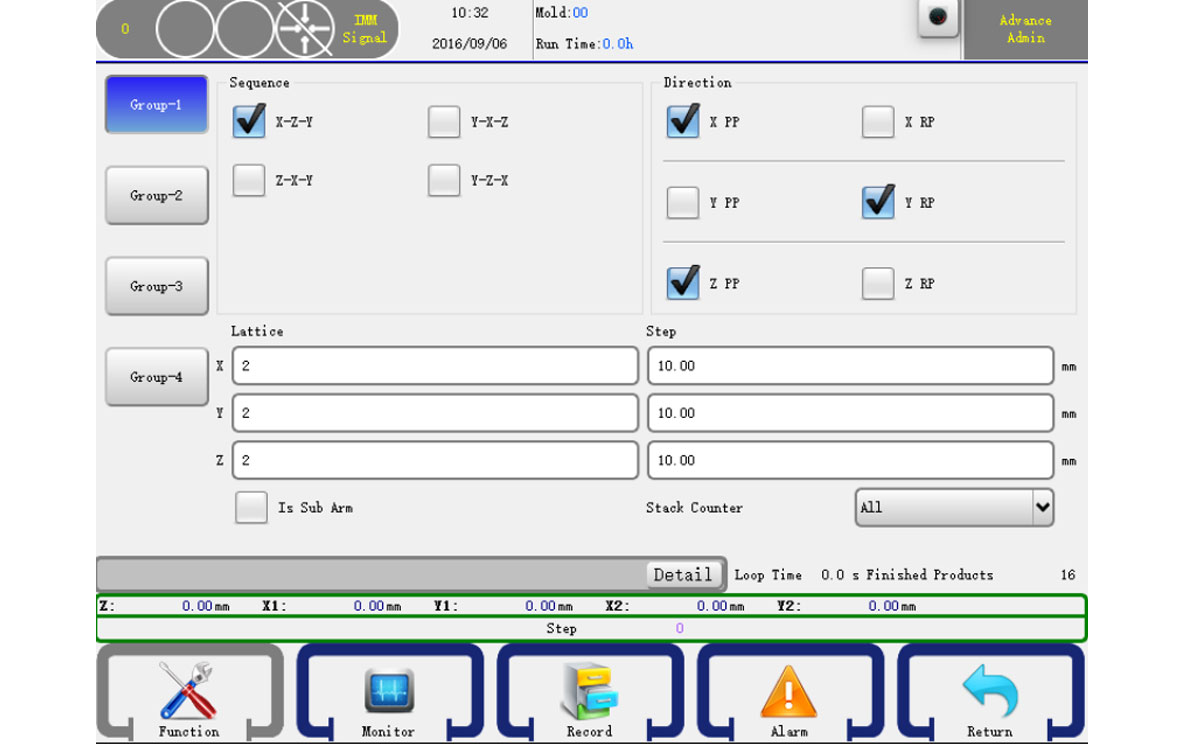
Il nostro sistema prevede quattro impostazioni di impilamento.
Sequenza: Seleziona la sequenza di impilamento
RP X: Se selezionato, il robot impila in senso inverso sull'asse X.
RP Y: Se selezionato, il robot impila in senso inverso sull'asse Y.
RP Z: Se selezionato, il robot impila in senso inverso sull'asse Z.
7.6.1 Impostazione
Fare clic sulla voce Impostazioni di sistema per accedere alla pagina delle impostazioni di sistema, come mostrato di seguito:
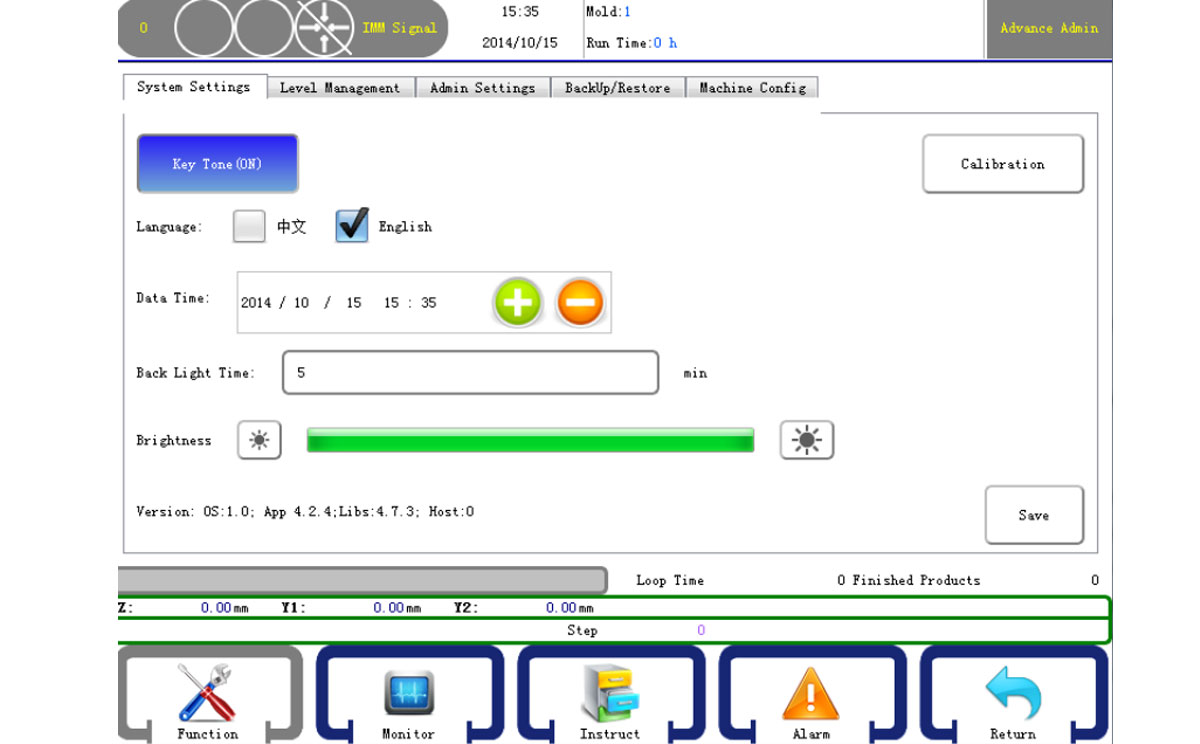
Tono tasti: Quando si preme, la tastiera emette un segnale acustico se è attiva.
Lingua: Seleziona la lingua dell'interfaccia.
Data e ora: Imposta la data e l'ora correnti.
Ora retroilluminazione: Se non viene eseguita alcuna operazione nell'impostazione dell'ora, la retroilluminazione si spegne.
Versione: Versione del sistema.
Fai clic su Salva per confermare una volta completate le impostazioni di sistema.
7.6.2 Gestione dei livelli
Fare clic sulla voce Gestione livelli per accedere alla pagina delle impostazioni di sistema, come mostrato di seguito:
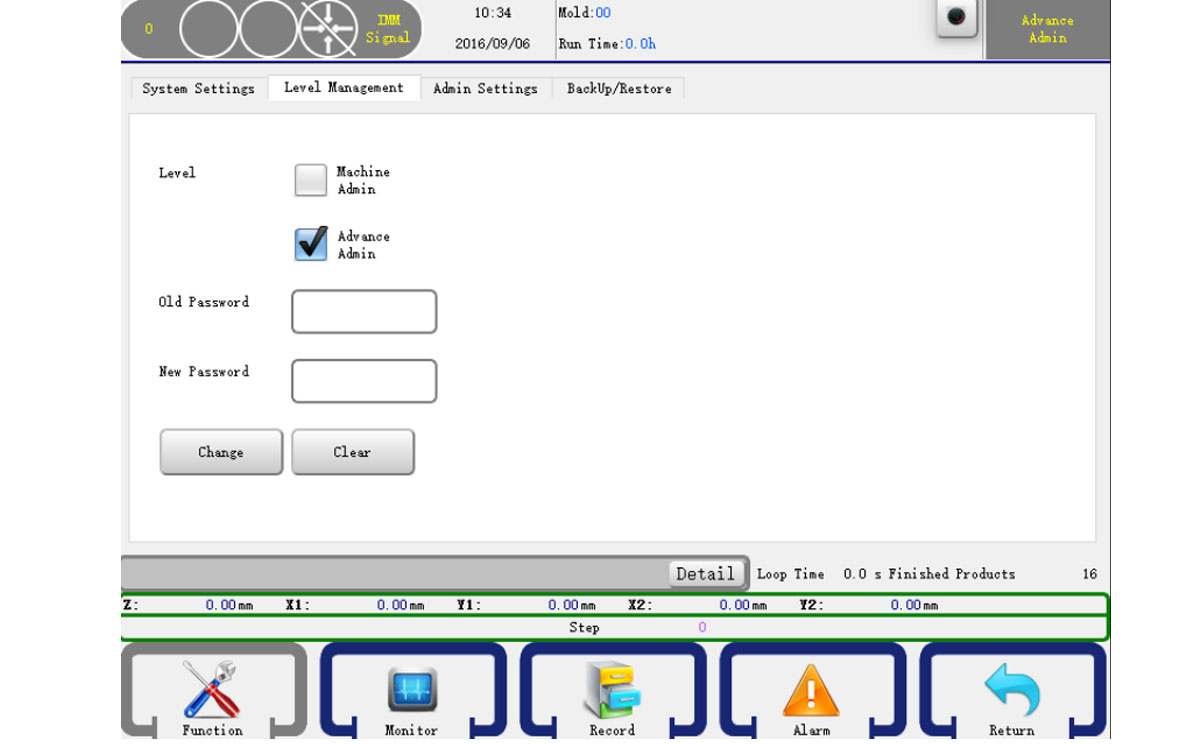
La gestione dei livelli può modificare le informazioni di base, mentre l'amministratore può modificare qualsiasi parametro. Inserisci la vecchia password, quindi inseriscine una nuova e conferma, per modificare la password.
7.6.3 Backup/Ripristino
Fare clic sulla voce Backup/Ripristino per accedere alla pagina delle impostazioni di sistema, come mostrato di seguito:
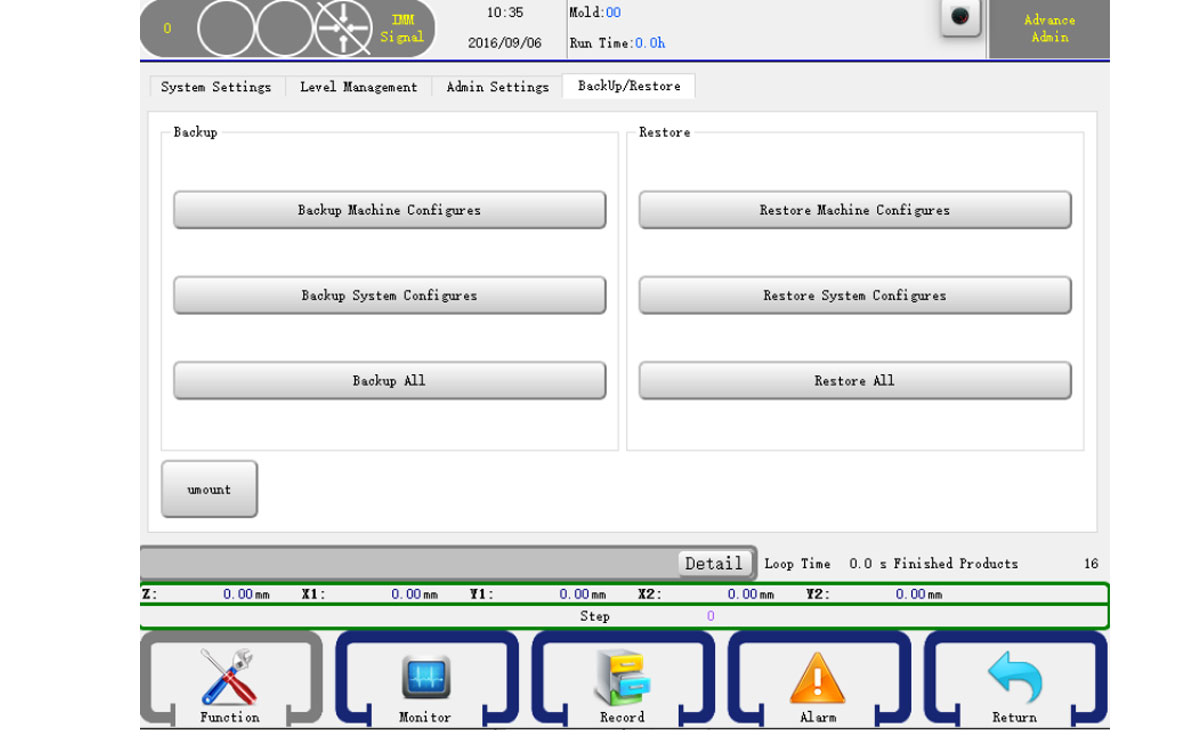
È possibile utilizzare la chiavetta USB per eseguire il backup o il ripristino di "Parametri macchina", "Parametri di sistema" e "Parametri stampo" oppure selezionare tutti i dati per il backup/ripristino.
Fare clic sulla voce Impostazioni struttura per accedere alla pagina delle impostazioni della struttura, come mostrato di seguito:
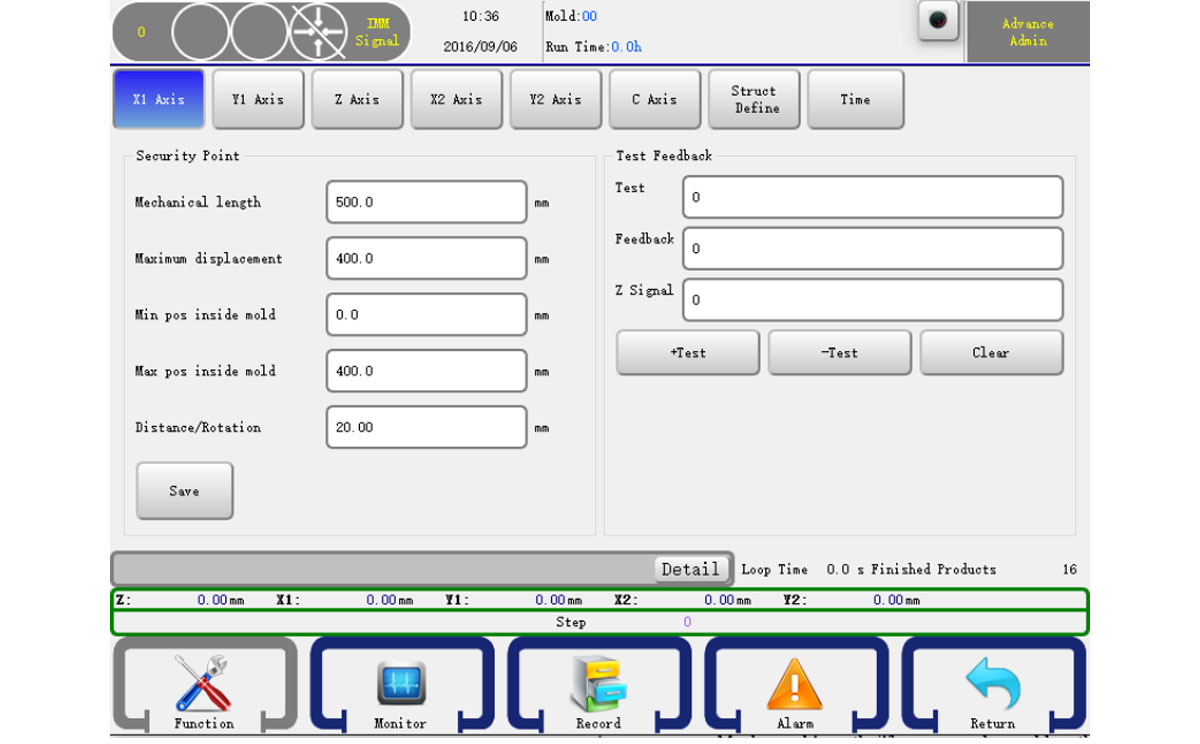
Lunghezza meccanica: La lunghezza meccanica dell'asse.
Distanza/Rotazione: La distanza di una rotazione del servo.
È anche possibile impostare altri parametri come 5.4. Premere il pulsante Salva per confermare la modifica. ATTENZIONE: La definizione della struttura può causare danni alla macchina e lesioni personali! Contattare il produttore.
Fare clic sulla voce Mantiene per accedere alla pagina di manutenzione, come mostrato di seguito:
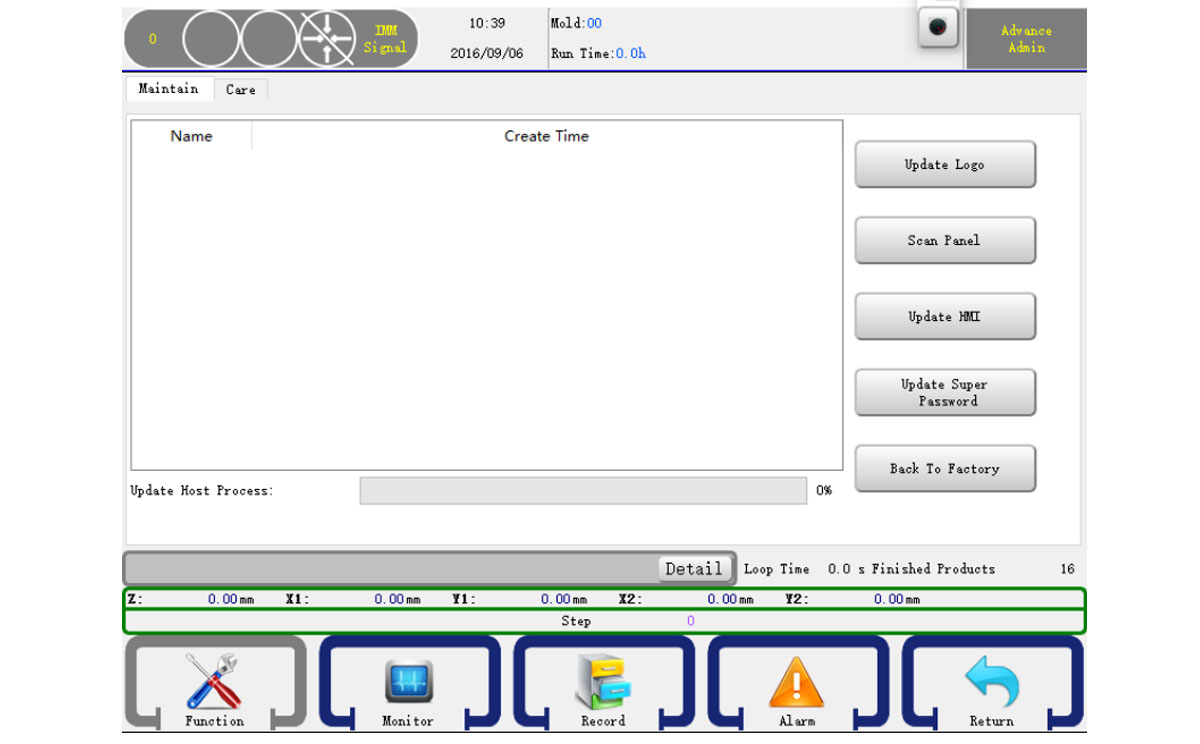
È possibile aggiornare il sistema del pannello di controllo tramite USB. Inserire il pacchetto di aggiornamento del sistema su un disco USB. Fare clic sul pulsante Aggiorna e attendere qualche istante. La pagina mostrerà la versione del sistema se è possibile controllare il pacchetto di aggiornamento del sistema dal disco. In caso contrario, premere nuovamente il pulsante Aggiorna o utilizzare un altro disco USB. Se il pacchetto di aggiornamento del sistema è stato controllato, fare clic sul pulsante Aggiorna per avviare l'aggiornamento del sistema. Al termine, verrà visualizzato un messaggio e il sistema si riavvierà, quindi sarà possibile scollegare il disco USB.
Tecnologia IML Express
Fakuma 2023 - LK IMM in mostra Serov e tutte le macchine per stampaggio a iniezione elettriche
Arburg on show 2 cavlities 1Litter bucket IML system with handle assembly in 2012.
K-Fair 2022, FANUC presenta soluzioni per iniezione di materie plastiche biologiche chiavi in mano
NPE 2024 -- Haitian in mostra la quinta generazione della macchina per stampaggio a iniezione a due piani della serie Jupiter
La nuova scatola rettangolare SWITEK a 4 cavità con ingresso laterale anti-manomissione e 5 facce IML Solutions ha completato i test interni prima della consegna.
ChenHsong presenterà la soluzione di produzione di iniezione di lastre di cristallo ad ArabPlast 2025 di JM168
Completato l'assemblaggio del nuovo robot IML SWITEK per l'etichettatura avvolgente e inferiore
Fakuma 2023 -- ENGEL presenta la sua macchina per lo stampaggio a iniezione completamente elettrica con soluzioni IML chiavi in mano
Haitian dimostra la nuova macchina per stampaggio a iniezione a due piastre JU5500V/3450 con la soluzione di schiumatura fisica a microapertura
Chinapals 2025 aprirà il 14 aprile 2025 presso lo Shenzhen World Exhibition & Convention Center
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China





