
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
Quando ordinate un braccio robotico per il vostro progetto di stampaggio a iniezione, lo assembliamo in modo che i pezzi vengano scaricati dal lato operatore o dal lato opposto, a seconda del progetto. Tuttavia, a volte sarà necessario spostare il posizionamento dei pezzi sull'altro lato della macchina per stampaggio a iniezione. In questo caso, sarà necessario invertire l'installazione del braccio robotico. In questo capitolo, illustreremo un robot per iniezione servo a 3 assi con servomotore e driver Panasonic come esempio per dimostrare come installare i bracci robotici in modo invertito.
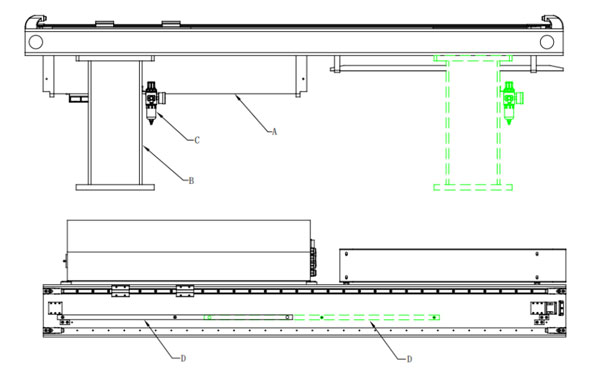
Base inversa
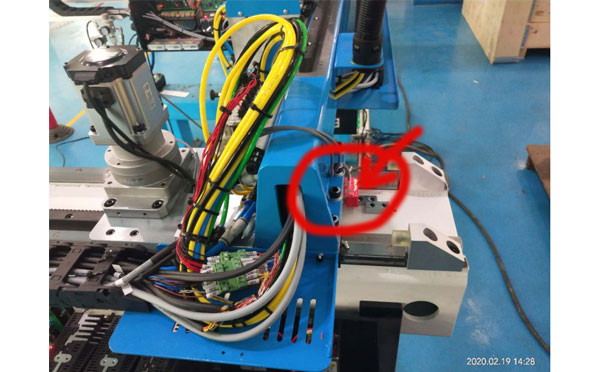
Sensore di retromarcia 1
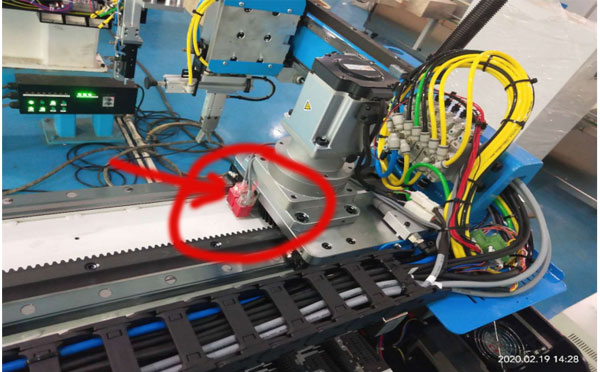
Sensore di retromarcia 2
Descrizione

Impostazione dei parametri Panasonic A6
Il processo di modifica:
Premere il tasto "S" e poi premere il tasto "M" (una volta), trovare Pr0.00 e premere il tasto "S" (una volta), se il parametro visualizzato è "1", modificarlo a "0"; se è "0", modificarlo a "1" (premere i tasti su/giù per modificare i parametri). Dopo aver completato tutte le impostazioni, premere il tasto "S" per 2 secondi e premere il tasto "M" (una volta) e premere il tasto "S" (una volta) e premere il tasto "UP" (tenere premuto per 7 secondi finché non viene visualizzato "-----") per salvare l'impostazione.
Ripetere la procedura sopra descritta per impostare i parametri di Pr0.12 e spegnere e riavviare il robot al termine dell'impostazione di tutti i parametri. Il robot verrà inizializzato con la nuova impostazione.
ATTENZIONE: Per la sicurezza del vostro impianto, vi preghiamo di effettuare qualsiasi modifica dei parametri seguendo le istruzioni del nostro team di assistenza online. Il nostro tecnico vi guiderà passo dopo passo per completare l'intero processo.
Tecnologia IML Express
Il nuovo sistema IML SWITEK per tazze a 6 cavità con etichetta metallica è pronto per la produzione in serie
SWITEK sta testando internamente il sistema IML con ingresso dall'alto per secchi di vernice da 20 litri
Il nuovo robot IML con ingresso laterale SWITEK per il bidone della polvere IML da 55 litri è pronto per i test interni
K-Fair 2022, FANUC presenta soluzioni per iniezione di materie plastiche biologiche chiavi in mano
LS presenta le soluzioni di iniezione ad alta velocità ONE 145E a NPE 2024
NPE 2024, ChenHsong Machinery in mostra Soluzioni IML chiavi in mano
La nuova scatola rettangolare SWITEK a 4 cavità con ingresso laterale anti-manomissione e 5 facce IML Solutions ha completato i test interni prima della consegna.
LK presenta la macchina per stampaggio a iniezione FORZA a due piastre alla fiera K 2016 con soluzione IML con ingresso laterale dei secchi
SWITEK nuove scatole rettangolari a 2 cavità e 5 facce Sistema IML di etichettatura IML top entry installato per la produzione.
Robot IML ad alte prestazioni per la macchina per stampaggio a iniezione ibrida HAIDA HD360DY
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China





