
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
Il braccio robotico servoassistita SWITEK a 3/5 assi è in grado di registrare più di 100 programmi per diversi tipi di stampi. In questo capitolo vi mostreremo come creare un nuovo programma, eseguire il backup di un programma esistente e ricaricarlo da una chiavetta USB, e come reagirà il braccio robotico al programma, ecc.
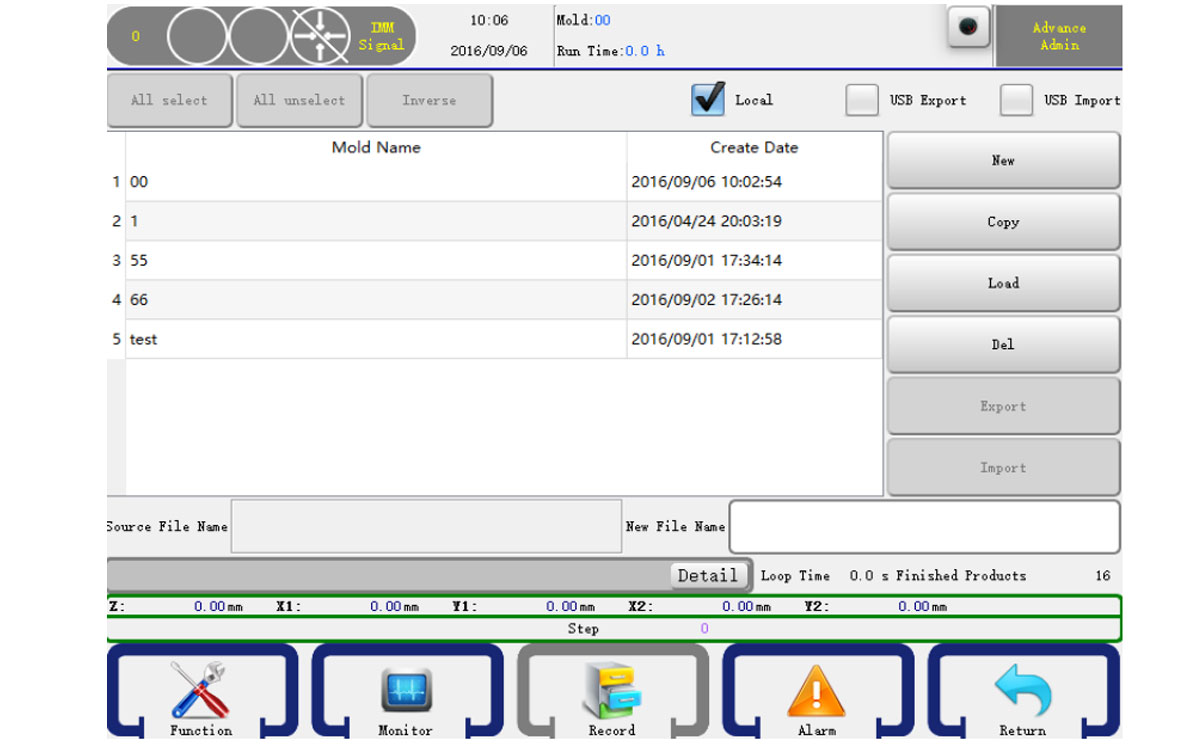
Sullo stato di arresto, quindi fare clic sul pulsante di registrazione sulla barra dei menu per accedere alla pagina di gestione delle registrazioni. È possibile gestire i programmi in questa pagina. Come mostrato di seguito:
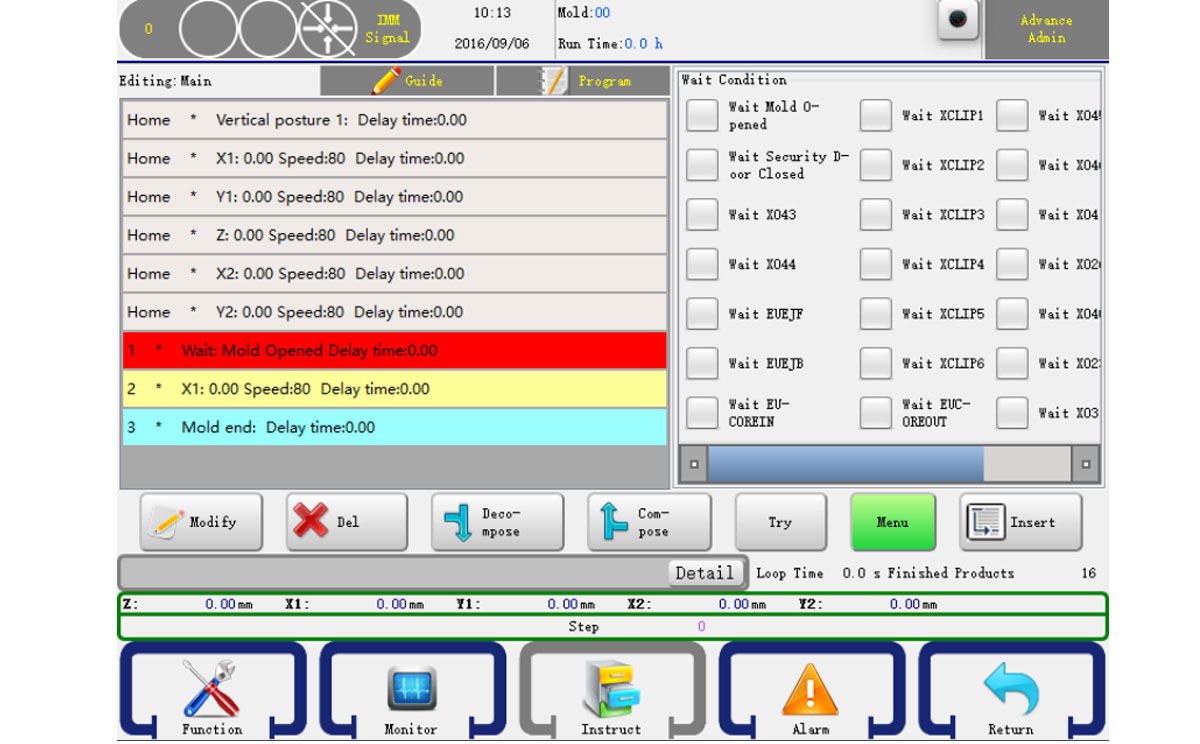
Ruotare la manopola verso sinistra per passare allo stato manuale, quindi fare clic sul pulsante di apprendimento sulla barra del menu principale per aprire l'editor di programma. Come mostrato di seguito:
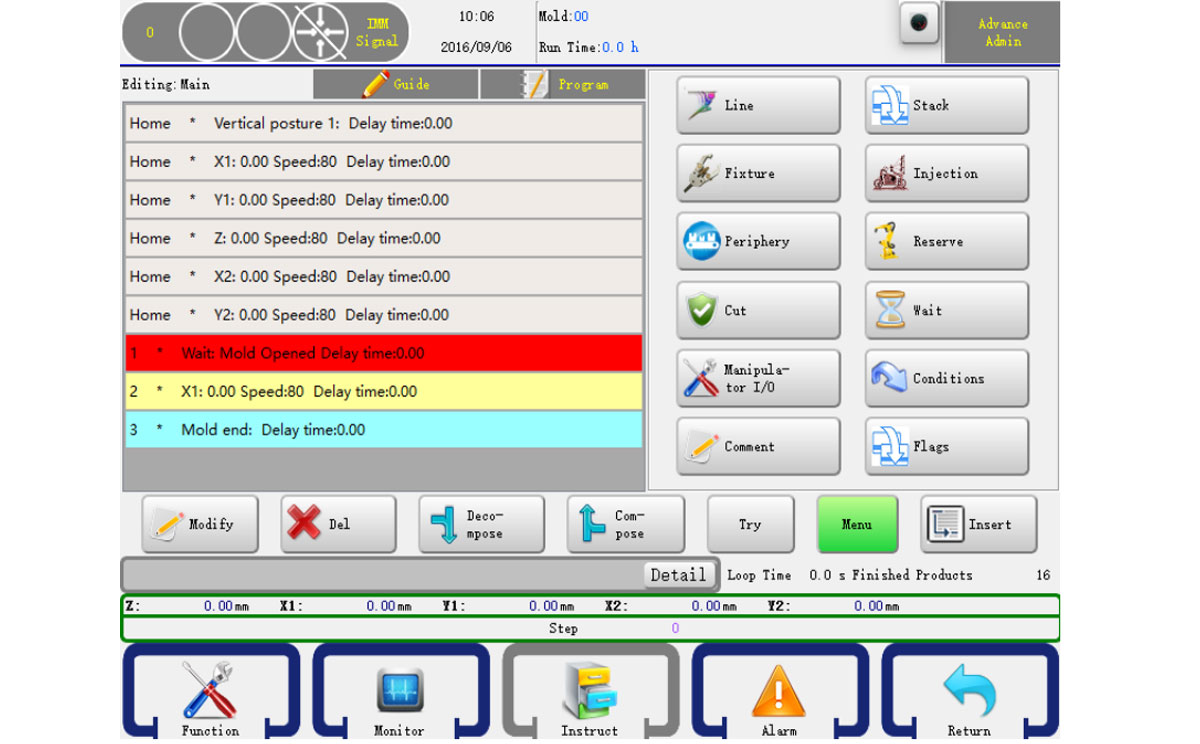
Azione servo, azione stack, azione fixture, iniezione, azione ausiliaria, azione di riserva, azione di controllo, azione di attesa, azione in serie e periferia sono incluse nel pulsante "Istruisci". Cliccando su questi pulsanti è possibile modificare un programma. Premere "Istruisci" per tornare al menu.
In modalità istruzione, dopo aver selezionato le azioni che si desidera combinare, fare clic su "Combinazione" e si otterrà la stessa fase di azione che funziona contemporaneamente durante il funzionamento automatico. È anche possibile separare una fase combinata in più fasi premendo il pulsante "Interrompi".
6.2.1 Azione servo
Cliccando sul pulsante Linea si accede all'editor delle azioni servo, dove è possibile impostare lo stato degli assi X1(X2), Y1(Y2), Z, C(Postura), come mostrato di seguito:
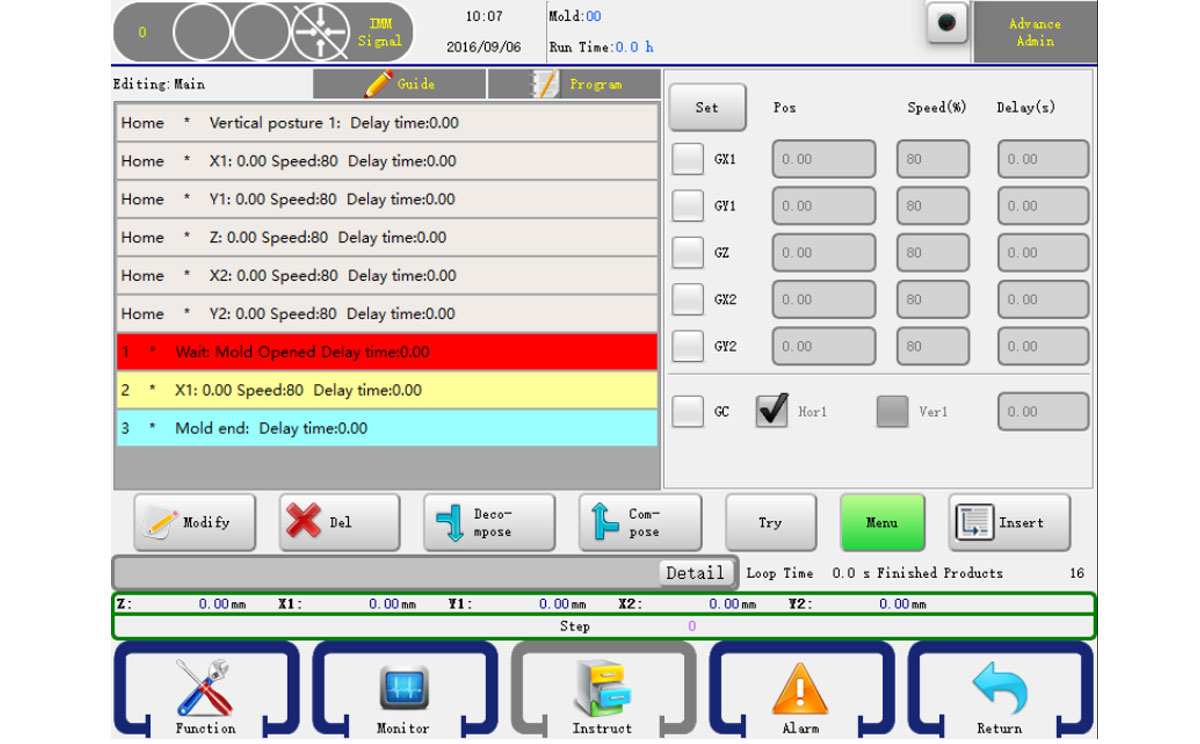
In questa pagina è possibile impostare la posizione degli assi X1(X2), Y1(Y2), Z, la velocità operativa e il tempo di ritardo. Dopo aver cliccato sull'icona √ sulla sinistra, impostare i parametri degli assi, selezionarli e cliccare sul pulsante "Inserisci" in modo che le impostazioni corrispondenti vengano confermate e inserite nei passaggi del programma.
Esistono due modi per impostare la posizione dell'asse:
6.2.2 Punto di partenza del programma
I sei passaggi sono mostrati come posizione di origine e posa dei sei assi
I sei passaggi dello stato [Home] sopra, che rappresentano lo stato predefinito in un nuovo programma, possono essere modificati semplicemente cliccando su "Modifica" per modificare la posizione iniziale, la velocità operativa e il tempo di ritardo degli assi, senza essere eliminati.
6.2.3 Azione Stack
Fare clic sul pulsante Stack per accedere all'editor delle azioni stact, come mostrato di seguito:
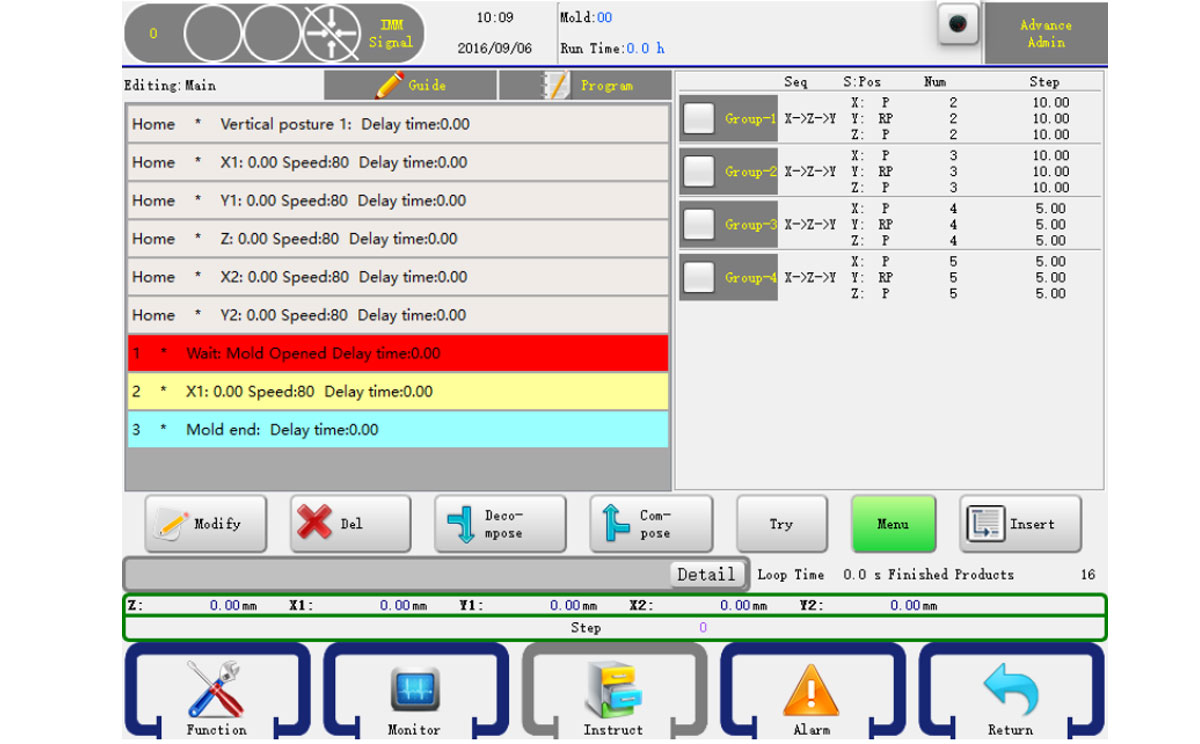
Selezionare il lato sinistro della pila per inserire il gruppo di programmi, impostare il gruppo e quindi fare clic sul pulsante Inserisci davanti alla fase di impilamento. Il robot impilerà i prodotti in ordine durante il funzionamento automatico.
Se si desidera utilizzare l'asse Y per impilare, è necessario assicurarsi che la pila sia inserita prima che l'asse Y inizi l'operazione di abbassamento.
6.2.4 Azione di fissaggio
Fare clic sul pulsante Fixture per accedere all'editor delle azioni di fixture e ventose, come mostrato di seguito:
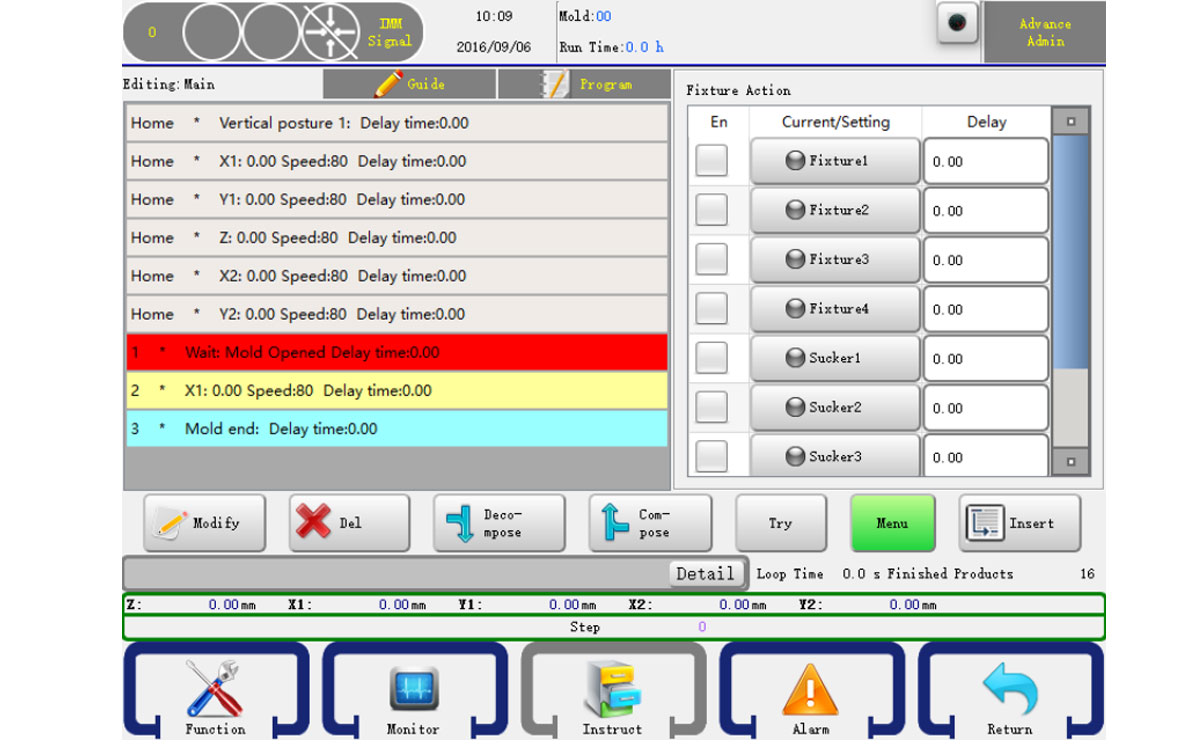
Il controller può impostare quattro fixture e due azioni di ventosa. Cliccando sul pulsante da controllare, l'indicatore diventa rosso all'uscita. Quindi, cliccando a sinistra, in modo che diventi √, cliccando su "Inserisci", il passaggio dell'azione viene inserito nei passaggi iniziali della procedura di selezione.
Dopo aver inserito l'azione di fissaggio e di ventosa, assicuratevi di inserire l'azione di controllo, altrimenti il programma non ne verificherà il segnale di conferma. Se non confermate il segnale, non avrete bisogno dell'azione di controllo. In ogni caso, è meglio che l'azione di controllo protegga la macchina.
6.2.5 Azione IMM
Fare clic sul pulsante Iniezione per accedere all'editor delle azioni di iniezione, come mostrato di seguito:
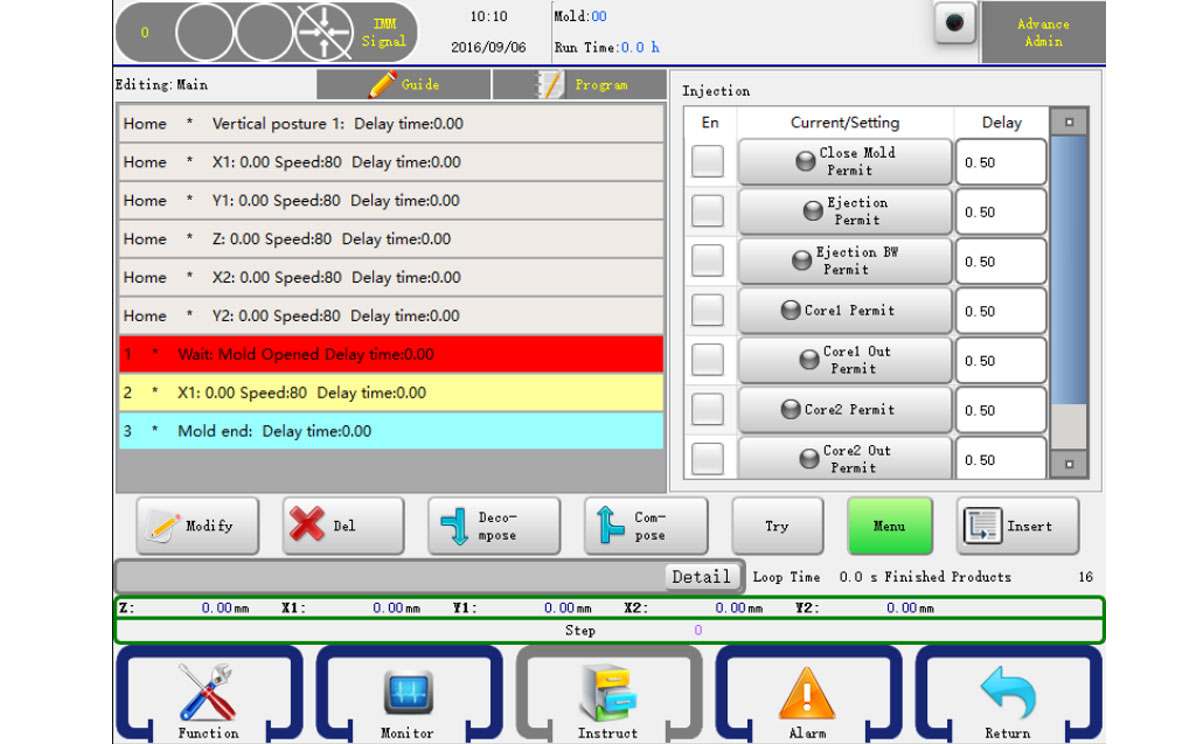
Il funzionamento è lo stesso dell'azione di programmazione. Vedere 6.2.4.
6.2.6 Azione ausiliaria
Cliccando sul pulsante Ausiliario si accede all'editor delle azioni periferiche, dove è possibile trovare le azioni relative a iniettore, trasportatore, punto di riserva e stack, come mostrato di seguito:
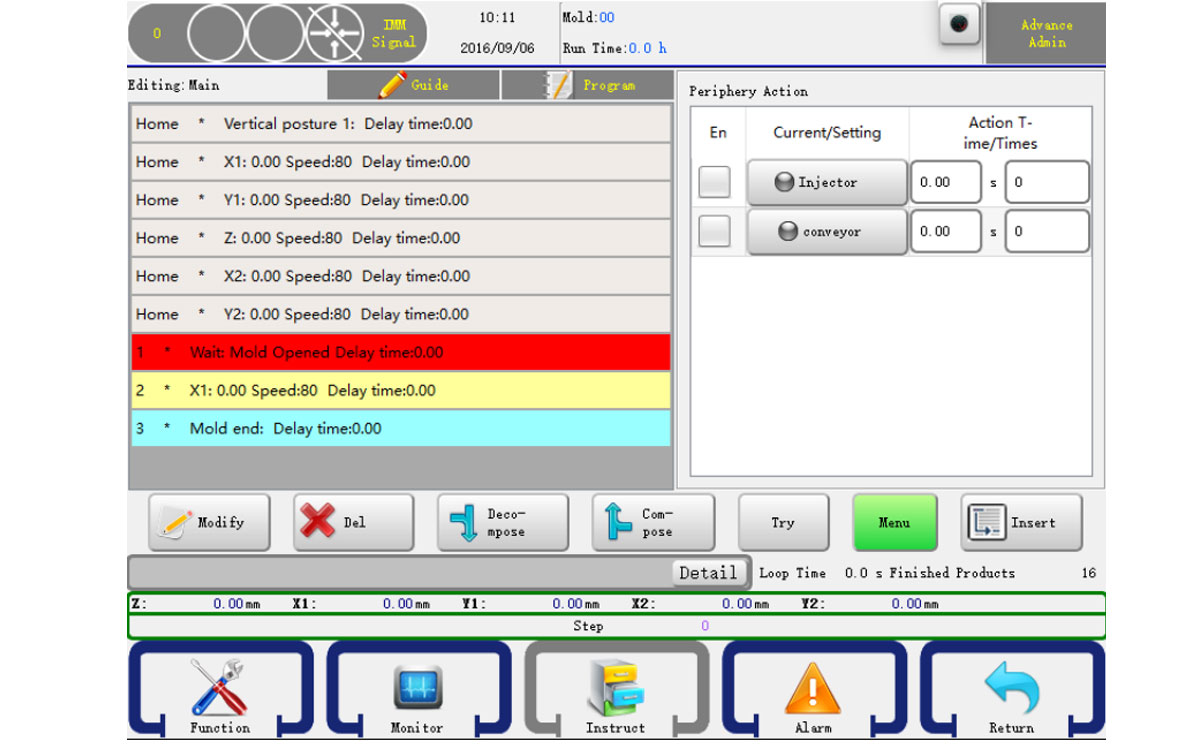
Il funzionamento è lo stesso dell'azione di programmazione. Vedi 6.2.4
Tempi: Indica per quanto tempo eseguire l'azione in un ciclo.
Ritardo: Imposta quanti stampi devono essere in modalità Auto all'uscita, ad esempio uno o due alterni, ecc.
6.2.7 Azione di riserva
Fare clic sul pulsante Prenota per accedere all'editor delle azioni. Come mostrato di seguito:
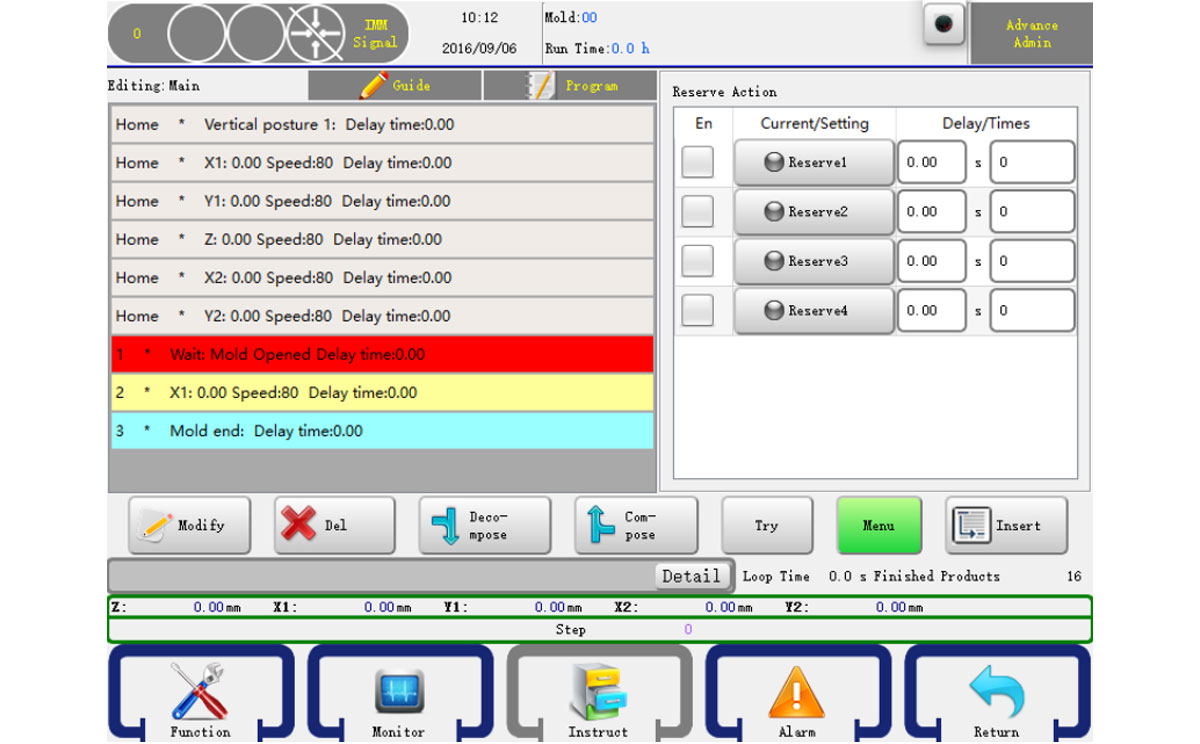
Ci sono quattro riserve nel sistema.
Tempi: Indica per quanto tempo eseguire l'azione in un ciclo.
Ritardo: Imposta quanti stampi devono essere in modalità Auto all'uscita, ad esempio uno o due ogni due, ecc.
6.2.8 Azione di attesa
Fare clic sul pulsante "Attendi" per accedere all'editor delle azioni di attesa. Questo tipo di azione implica che il programma si arresterà prima che il segnale di ingresso che si desidera attendere sia attivo. L'editor è mostrato di seguito:
Basta selezionare il segnale che si desidera attendere e cliccare sul pulsante Inserisci per confermare la modifica.
6.2.9 Comment
Clicca sul pulsante Commento per accedere all'editor dei commenti, dove potrai lasciare un commento sul programma.

È possibile utilizzare la tastiera virtuale per immettere le informazioni.

6.2.10 Condizioni
Puoi anche impostare delle condizioni nel tuo programma:
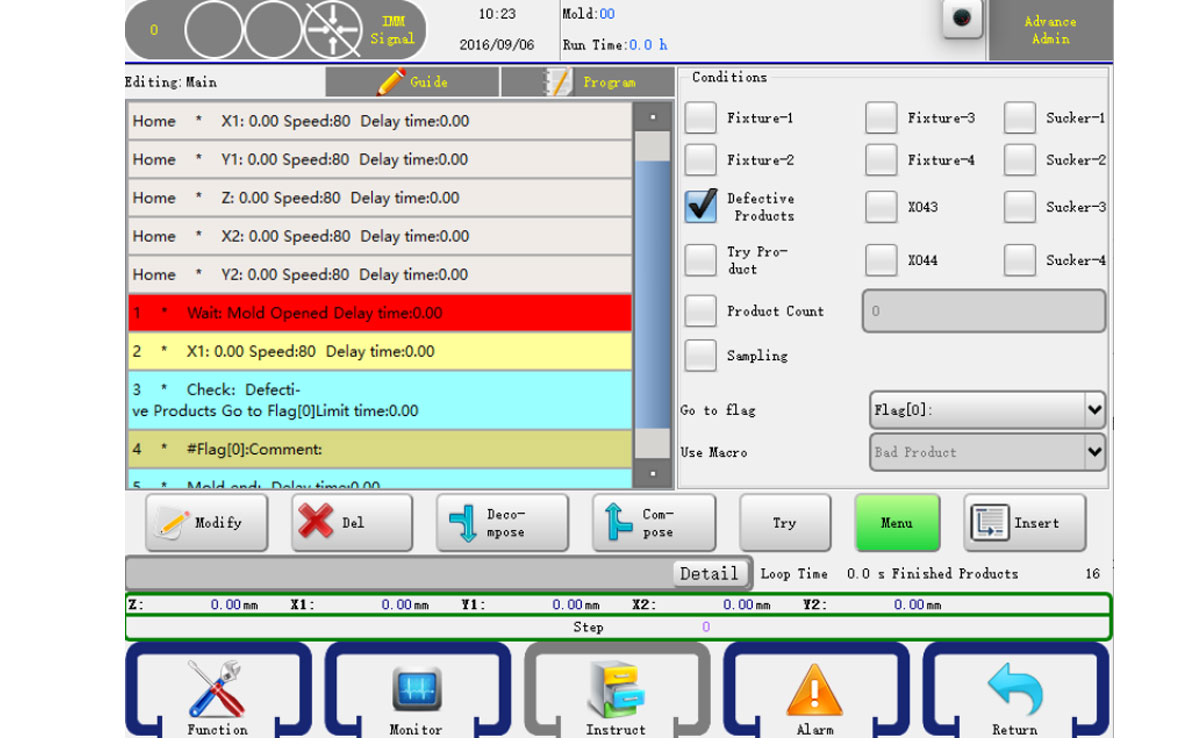
Attenzione: Il programma deve avere un commento per utilizzare le condizioni.
6.2.11 Modifica programma
Seleziona il passaggio che desideri modificare e clicca sul pulsante Modifica. Si aprirà la finestra di dialogo di modifica, come mostrato di seguito:
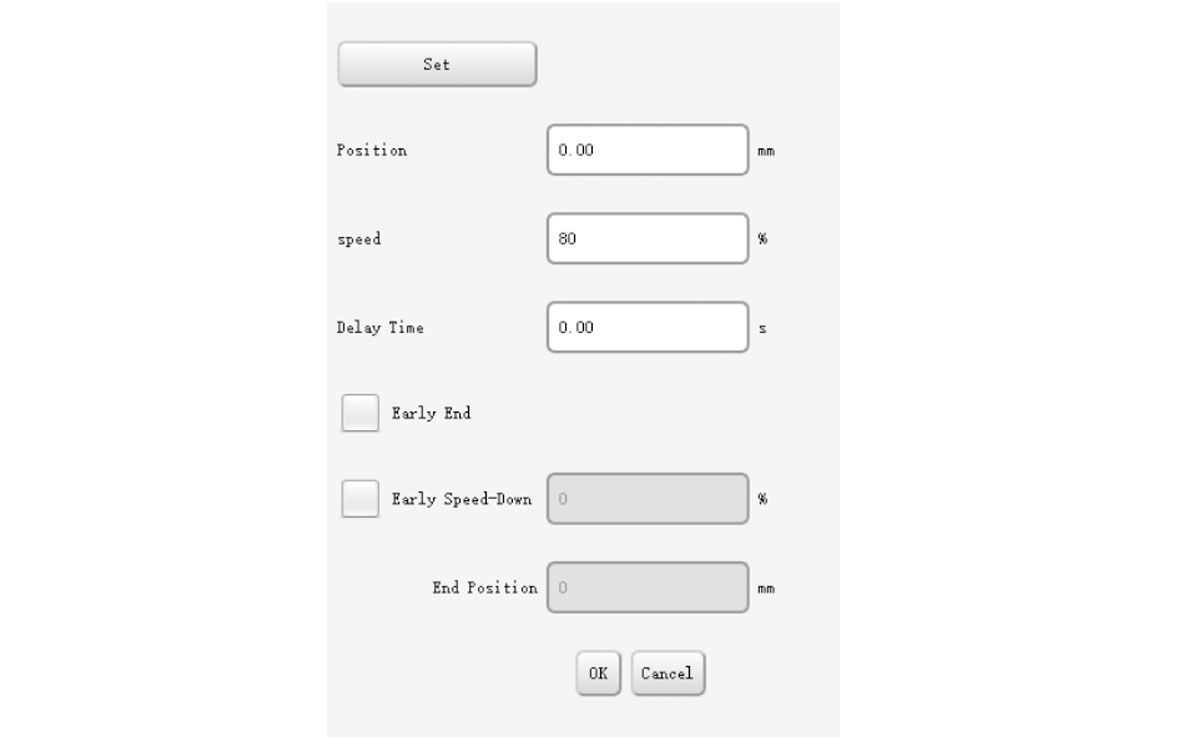
È possibile modificare la configurazione dell'azione e premere OK per confermare.
La seguente procedura vi aiuterà ad apprendere e mettere in pratica la programmazione del robot. Nel programma del robot per stampi, a seconda della situazione reale, impostate la posizione del servoasse e impostate la sequenza corretta con la macchina per stampaggio a iniezione.
6.3.1 Comando
La procedura utilizzata per prelevare i prodotti e alimentare la coda prevede che il robot rimanga nella parte superiore della macchina per stampaggio a iniezione e attenda il segnale di apertura stampo. Quando lo stampo della macchina per stampaggio a iniezione si apre, i bracci si abbassano e prelevano i prodotti e il canale di colata, quindi depositano il canale di colata nel frantoio, depositando il prodotto sul trasportatore, che si muove a ogni ciclo dello stampo.
6.3.2 Azioni
> Passare alla modalità automatica.
> I bracci si spostano verso il punto di partenza in attesa del segnale di apertura stampo.
> Aspirazione 1 per il prodotto, dispositivo 1 per il canale di colata.
> I bracci escono dalla pressa a iniezione e attivano il segnale di chiusura stampo.
> Rilasciare il canale di colata.
> Abbassare il prodotto sul nastro trasportatore e iniziare a muoversi per 3 secondi.
> I bracci tornano in posizione di attesa.
6.3.3 Programma
Home X1: 0.0 Speed: 30 Delay time: 0.00
Home Y1: 0.0 Speed: 30 Delay time: 0.00
Home Z: 0.0 Speed: 30 Delay time: 0.00
Home X2: 0.0 Speed: 30 Delay time: 0.00
Home Y2: 0.0 Speed: 30 Delay time: 0.00
Home Vertical Posture Delay time: 0.00
Tecnologia IML Express
Fakuma 2023 -- Scopri quali sono le aspettative di Spetztekhosnastka Ltd., l'espositore di Fakuma dall'Ucraina
Completato l'assemblaggio del nuovo robot IML SWITEK per l'etichettatura avvolgente e inferiore
Arburg on show 2 cavlities 1Litter bucket IML system with handle assembly in 2012.
Demag espone le soluzioni rPET IML a PlastImagen 2025 con StackTeck in Messico
Fakuma 2023 -- ENGEL presenta la sua macchina per lo stampaggio a iniezione completamente elettrica con soluzioni IML chiavi in mano
LK presenta la macchina per stampaggio a iniezione FORZA a due piastre alla fiera K 2016 con soluzione IML con ingresso laterale dei secchi
Nuovo sistema IML SWITEK per gruppo secchio con maniglia avviato per produzione in serie
Fakuma 2023 -- Arburg On Show Soluzioni di automazione di IML e assemblaggio di cassette degli attrezzi
K-2022, Zhafir presenta la macchina per stampaggio a iniezione ibrida della serie Jenius
Il cliente indiano sta testando il suo nuovo sistema IML di 2 cavità da 1L
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China






