
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
Parole chiave:Robot IML; Funzionamento del robot IML; Robotica per l'etichettatura nello stampo
L'impostazione dei parametri meccanici del robot IML include la selezione della modularità dell'unità funzionale, i parametri meccanici dell'asse, il servomotore, ecc. per garantire che il robot IML funzioni in modo sicuro ed efficiente.
Selezione del modello

| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione del modello | Fare clic qui per selezionare il nome della modalità applicabile. |
| (2) | Salva | Dopo aver selezionato (1) il modello, cliccare su "Salva" per confermare l'operazione. |
| (3) | Vengono visualizzate le informazioni del modello selezionato | La sezione informativa viene visualizzata per i modelli per aiutarti a distinguerli. (Questa parte delle informazioni nel modello deve essere mantenuta durante la produzione per mantenerne l'accuratezza.) |
Si prega di notare che l'operazione di cui sopra, ovvero la selezione del modello e il salvataggio, non ha effetto immediato dopo il completamento del contenuto del modello. È necessario inizializzare i parametri meccanici e i parametri servo, quindi il salvataggio e il riavvio del sistema avranno effetto.
Parametri meccanici

| NO. | Nome | Funzione |
|---|---|---|
| (1) | Inizializzare | Cliccandoci sopra si leggeranno i dati iniziali dei parametri meccanici nel file del modello e li si invierà al display in (4). |
| (2) | Salva | Salva le modifiche esistenti |
| (3) | Pagina | I parametri vengono fatti scorrere verso l'alto e verso il basso. |
| (4) | I parametri vengono fatti scorrere verso l'alto e verso il basso. |
|
Si prega di notare che la modifica dei parametri sopra indicati non ha effetto immediato, ma deve essere salvata e avrà effetto solo dopo il riavvio del sistema.
Parametri di guida

| NO. | Nome | Funzione |
|---|---|---|
| (1) | Inizializzare | Cliccandoci sopra si leggeranno i dati iniziali dei parametri di azionamento nel file modello e li si visualizzerà sul display in (4). |
| (2) | Salva | Salva le modifiche esistenti. |
| (3) | Pagina | I parametri vengono fatti scorrere verso l'alto e verso il basso. |
| (4) | Contenuto dei parametri di guida | Ogni parametro del driver viene modificato e visualizzato. |
Istruzioni per l'impostazione di alcuni parametri dell'unità:
| NO. | Nome | Effetto | Valore iniziale | Allineare | Unità | Il punto principale dell'impostazione | |
|---|---|---|---|---|---|---|---|
| PA1-02 | Selezione del sistema INC/ABS | Riavviare | 0 | 0~1 | "0" è un motore incrementale, "1" è un motore assoluto | ||
| PA1-04 | Direzione di rotazione | Riavviare | 0 | 0~1 | Regola quando il motore ruota nella direzione sbagliata | ||
| PA1-13 | Modalità di sintonizzazione | In tempo reale | 0 | 0~2 | 0 è automatico, 1 semiautomatico, 2 manuale. Il robot è impostato su 1 al momento della spedizione. | ||
| PA1-14 | Rapporto carico/coppia | In tempo reale | 23.0 | 0.0~300 | Volte | ||
| PA1-15 | Guadagno di sintonizzazione | In tempo reale | 7 | 1~40 | |||
| PA1-27 | Valore limite di coppia in avanti | In tempo reale | 300 | 0~500 | |||
| PA1-28 | Valore limite di coppia negativo | In tempo reale | 300 | 0~500 | |||
| PA1-52 | Impostazione S acc/dcc | In tempo reale | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Un numero fisso di risposte al comando di posizione | In tempo reale | 30.0 | 0.00~250.00 | |||
| PA1-55 | Guadagno dell'anello di posizione 1 | In tempo reale | 17 | 1~2000 | |||
| PA1-56 | Guadagno dell'anello di velocità 1 | In tempo reale | 5 | 1~2000 | |||
| PA1-58 | Guadagno di feedback 1 | In tempo reale | 0.000 | 0.000~1.500 | |||
| PA1-59 | Filtraggio della coppia | Riavviare | 0.00 | 0.00~20.00 | |||
| PA1-70 | Modalità filtro Notch | In tempo reale | 1 | 0~1 | Quando 0, il rilevamento automatico 1 è valido per il valore impostato | ||
| PA1-71 | Numero di frequenza Notch 1 | In tempo reale | 134 | 10~4000 | |||
| PA1-72 | Attenuazione Notch 1 | In tempo reale | 1 | 0~40 | |||
| PA1-73 | Larghezza tacca 1 | In tempo reale | 2 | 0~3 | |||
| PA1-74 | Numero di frequenza Notch 2 | In tempo reale | 53 | 10~4000 | |||
| PA1-75 | Attenuazione Notch 2 | In tempo reale | 1 | 0~40 | |||
| PA1-76 | Larghezza della tacca 2 | In tempo reale | 2 | 0~3 | |||
| PA1-78 | Il numero di frequenza 0 dell'antirisonanza di frenata | In tempo reale | 7.0 | 1~300.0 | Hz | La soppressione delle vibrazioni è efficace durante l'arresto ed è necessario misurare la vibrazione effettiva prima dell'impostazione. | |
| PA1-79 | Rapporto di inerzia delle vibrazioni del freno | In tempo reale | 0 | 0~80 | Se impostato su 0, PA1-78 non sarà valido, mentre se impostato su 1, PA1-78 sarà valido. | ||
| PA1-80 | La frequenza numero 1 dell'antirisonanza di frenata | In tempo reale | 8.0 | 1~300.0 | Hz | La soppressione delle vibrazioni è efficace durante l'arresto ed è necessario misurare la vibrazione effettiva prima dell'impostazione. | |
| PA1-81 | Rapporto di inerzia delle vibrazioni del freno | In tempo reale | 0 | 0~80 | Se è impostato su 0, PA1-80 non è valido, mentre se è impostato su 1, PA1-80 è valido. | ||
| PA1-94 | Modalità filtro di coppia | Riavviare | 0 | 0~1 | Impostare su 0 e non utilizzare il filtraggio di coppia | ||
| PA2-64 | Tempo di azione del freno | In tempo reale | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | Selezione della resistenza retrograda | Riavviare | 1 | 0~1 | Impostare 1 quando la resistenza di rigenerazione è collegata e 0 quando non è collegata | ||
| PA2-69 | Deviazione rispetto al valore rilevato | In tempo reale | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Impostazione del valore di impedenza retrograda | In tempo reale | 30.0 | 3.9~160.0 | Ω | Il valore della resistenza rigenerativa è impostato | |
| PA3-80 | Impostazione della potenza di impedenza di rigenerazione | In tempo reale | 40 | 1~5000 | W | Impostazione della capacità di resistenza retroattiva | |
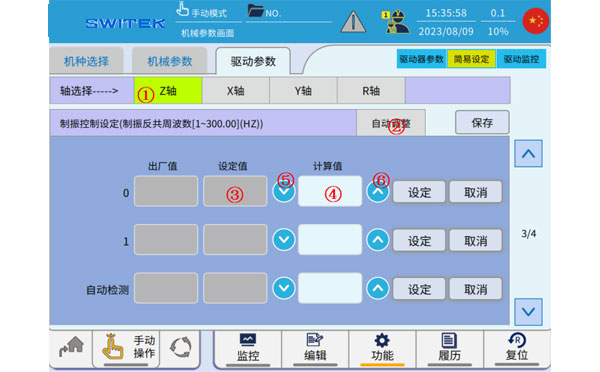
Modalità di configurazione e messa a punto semplice

| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione dell'asse | Fare clic per selezionare l'asse su cui si desidera lavorare. |
| (2) | Auto-tune | Quando la macchina viene regolata prima di uscire dalla fabbrica, i parametri di azionamento possono essere dedotti in questa modalità. |
| Accordatura semiautomatica | Modalità di sintonizzazione semiautomatica, alcuni parametri sono fissi, mentre altri parametri saranno regolati con precisione. | |
| Accordatura manuale | Tutti i parametri di azionamento sono fissi. | |
| (3) | Set value | The tuned gain, to-inertia-to-torque ratio currently in use. |
| (4) | Calculated value | The value derived from the current calculation. |
| (5) |  | Apply the Calculated Value content to the Set Value. |
| (6) |  | Applica il contenuto del "Valore impostato" al "Valore calcolato". |
| (7) | Salva | Modificare e salvare i parametri correnti del driver. |
In modalità automatica, è possibile cambiare la modalità di regolazione di ciascun asse su questa interfaccia, modificare il rapporto inerzia-coppia e il guadagno di regolazione, in modo da osservare l'effetto operativo dei valori impostati in tempo reale e trovare impostazioni dei parametri più ragionevoli.
Quando impostato sulla modalità di auto-tuning, il parametro PA1-14 rapporto inerzia-coppia viene misurato in tempo reale.
La funzione principale della modalità di sintonizzazione automatica è quella di regolare automaticamente il valore in base all'effetto di marcia quando i parametri di guida appropriati non sono noti nella fase iniziale del debug, finché l'effetto di marcia non è buono e stabile e il valore del rapporto inerzia-coppia tenderà a essere costante.
Quando l'effetto di funzionamento è stabile, passare alla modalità di regolazione semiautomatica, impostare manualmente i parametri, salvarli, spegnere il motore e riavviarlo prima che i parametri diventino effettivi. Nella modalità di regolazione semiautomatica, i parametri principali come il "rapporto di coppia inerziale" saranno fissi e alcuni parametri del servo saranno comunque regolati in tempo reale per garantire un funzionamento regolare.
Impostando la "Modalità di sintonizzazione manuale", tutti i parametri dei servocomandi sono fissi. Questa modalità richiede un elevato grado di precisione nell'impostazione dei parametri.
Configurazione semplice - Impostazione del filtro Notch

| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione dell'asse | Fare clic per selezionare l'asse su cui si desidera lavorare. |
| (2) | Filtraggio adattivo | Funzione di filtraggio adattivo con commutazione ON/OFF. |
| (3) | Parametri correlati al filtraggio Notch | Vari parametri relativi alla funzione di filtraggio notch. |
Se si avverte un suono acuto nel servo in fase di accensione, al momento o durante il funzionamento, è possibile impostare il filtro adattivo su ON, che eliminerà automaticamente il suono anomalo causato dalla risonanza meccanica e potrà eliminare due punti di risonanza. Quando la frequenza di risonanza è impostata su 4000, non vi è alcun punto di risonanza.
Configurazione semplice - Impostazione del controllo delle vibrazioni
| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione dell'asse | Selezionare l'asse che si desidera azionare. |
| (2) | Regolazione automatica | I parametri rilevanti del controllo delle vibrazioni impostato vengono rilevati automaticamente. |
| (3) | Imposta valore | Parametri di controllo delle vibrazioni attualmente in uso. |
| (4) | Valore calcolato | Calcola il valore numerico derivato. |
| (5) | | Applicare il contenuto del Valore calcolato al Valore impostato. |
| (6) | | Applicare il contenuto del Valore calcolato al Valore impostato. |
Impostazione del controllo delle vibrazioni: è efficace per sopprimere le vibrazioni in fase di arresto e il valore di impostazione generale è 5-10. Il valore di impostazione può essere calcolato rapidamente in base alla forma d'onda della coppia ed è difficile impostarlo correttamente al primo tentativo.
Configurazione semplice - Rilevamento delle collisioni

| NO. | Nome | Funzione |
|---|---|---|
| (1) | Selezione dell'asse | La selezione dell'asse da impostare |
| (2) | Variazione massima della coppia |
Tecnologia IML Express
K-Fair 2022, FANUC presenta soluzioni per iniezione di materie plastiche biologiche chiavi in mano
Il cliente indiano sta testando il suo nuovo sistema IML di 2 cavità da 1L
Fakuma 2023 -- ENGEL presenta la sua macchina per lo stampaggio a iniezione completamente elettrica con soluzioni IML chiavi in mano
K-2022, Zhafir presenta la macchina per stampaggio a iniezione ibrida della serie Jenius
ChenHsong presenterà la soluzione di produzione di iniezione di lastre di cristallo ad ArabPlast 2025 di JM168
NPE 2024 - Yushin in mostra il robot di grandi dimensioni della serie MKA
K-2022, Yizumi presenta la soluzione IML chiavi in mano con la macchina per stampaggio a iniezione completamente elettrica ad alta velocità PAC250E
LK presenta la macchina per stampaggio a iniezione FORZA a due piastre alla fiera K 2016 con soluzione IML con ingresso laterale dei secchi
Il robot SWITEK 2 Cavities IML per secchio da 10 litri è pronto per i test
Il nuovo robot IML con ingresso laterale SWITEK per il bidone della polvere IML da 55 litri è pronto per i test interni
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China





