
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
Parole chiave:Robot IML; Funzionamento del robot IML; Robotica per l'etichettatura nello stampo
Il "LIVELLO" del robot IML rispetto alla macchina per stampaggio a iniezione e allo stampo è fondamentale per la qualità dei pezzi. Qui spiegheremo passo dopo passo come installare un robot IML SWITEK, con il "LIVELLO" del robot IML ben regolato per garantire una produzione efficiente di contenitori IML di alta qualità.
Fase 1: Layout dell'installazione del sistema IML
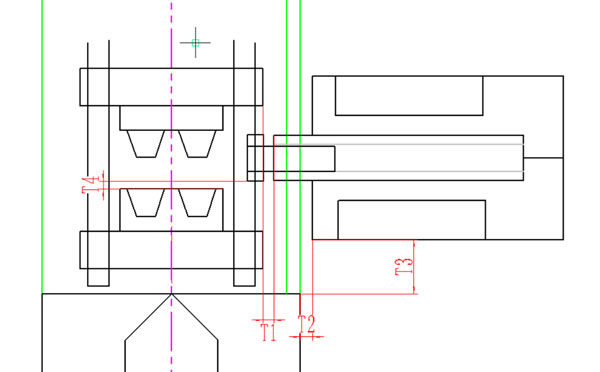
Il robot IML con ingresso laterale è installato sul lato non operatore della pressa a iniezione. La porta di sicurezza sul lato non operatore della pressa a iniezione viene aperta in modo permanente per consentire al robot IML di entrare nella pressa per il prelievo dei pezzi e l'inserimento delle etichette, senza interferire con l'apertura e la chiusura dello stampo. I parametri T1, T2, T3, T4 sono le linee guida generali per lo spazio tra il robot IML, la pressa a iniezione e lo stampo in un'installazione con sistema IML. Assicurarsi che T1 sia >6 cm e T4 >2 cm.
T2 è la distanza tra il robot IML e la macchina per stampaggio a iniezione. Se non siamo sicuri di quale sia la distanza tra il robot IML e la macchina per stampaggio a iniezione, dobbiamo assicurarci che T1 sia >6 cm per evitare interferenze nella produzione.
La distanza T3 determinerà la posizione del braccio robotico IML durante il lavoro, per evitare che l'attrezzatura entri in collisione con lo stampo, anche se si verifica una piccola deviazione. Se non si è sicuri di quale sia T3, assicurarsi che T4 sia >2 cm dopo l'installazione dell'attrezzatura.
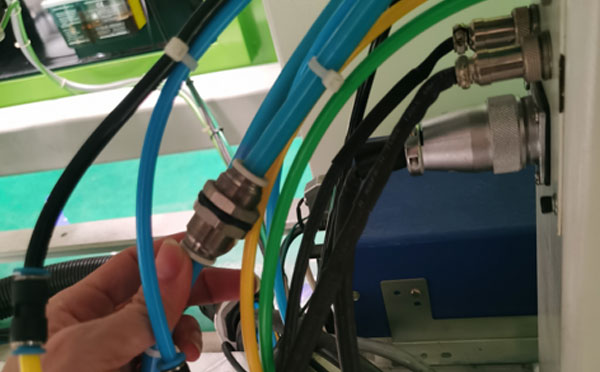
Fase 2: Collegamento della pipeline
Collegare l'alimentatore, il controller, la fonte d'aria e avviare il robot IML.

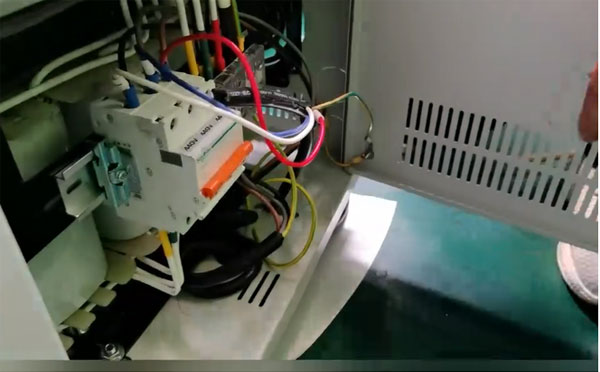
Dopo l'accensione, controllare il dispositivo di fissaggio del robot IML e rilasciarlo, quindi testare manualmente il movimento di ciascun asse e l'azione del dispositivo di fissaggio.

È possibile passare alla fase successiva del robot IML, dopo essersi assicurati che tutti i tubi dell'aria siano ben collegati e che i movimenti di tutti gli assi e dei dispositivi funzionino correttamente.

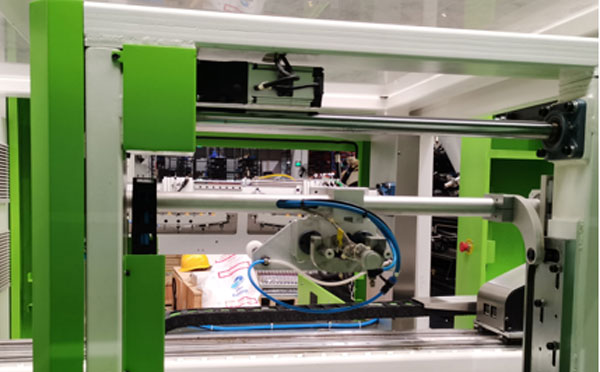
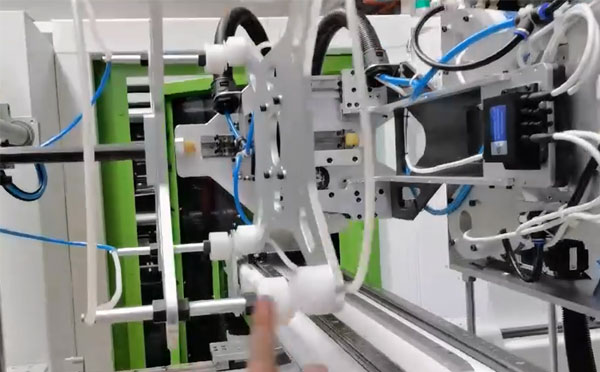
Fase 3: avvio del robot IML e regolazione del livello
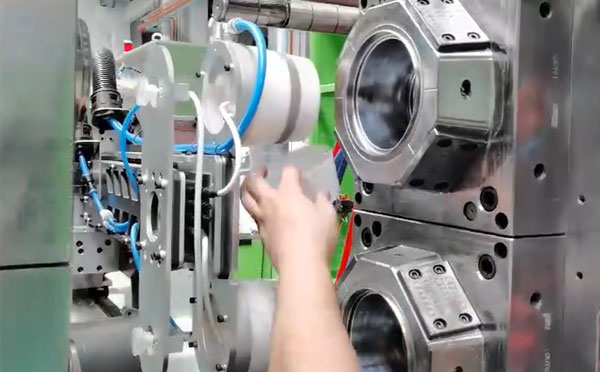
La distanza tra il mandrino e la cavità dello stampo è fondamentale per garantire che il robot possa posizionare l'etichetta in modo perfetto, il che determinerà la qualità del contenitore IML prodotto.
In un sistema IML installato perfettamente, il manichino del robot IML e la cavità dello stampo si troverebbero sullo stesso asse centrale. In questo caso faremo in modo che il manichino non incontri alcuna resistenza in entrata e in uscita dalle cavità dello stampo e che le etichette vengano posizionate senza collisioni e in posizione uniforme.
La posizione del mandrino e il suo livello rispetto alla cavità dello stampo possono essere regolati tramite i quattro piedini di supporto del robot IML e i tappi della macchina per stampaggio a iniezione.
La procedura per regolare il livello del sistema IML è la seguente:
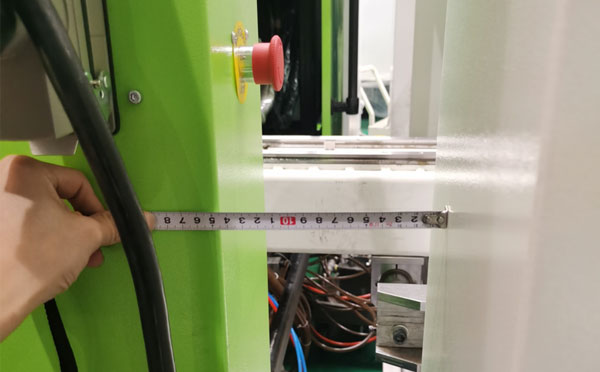
Regolare il livello della macchina per stampaggio a iniezione: utilizzare il bordo del piano mobile come punto di riferimento e assicurarsi che entrambi i lati dello stampo siano paralleli al bordo del piano fisso.
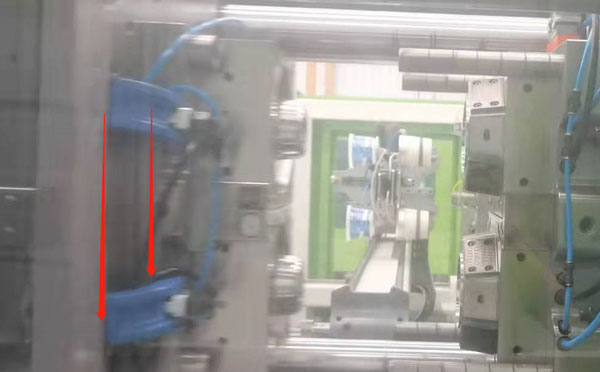
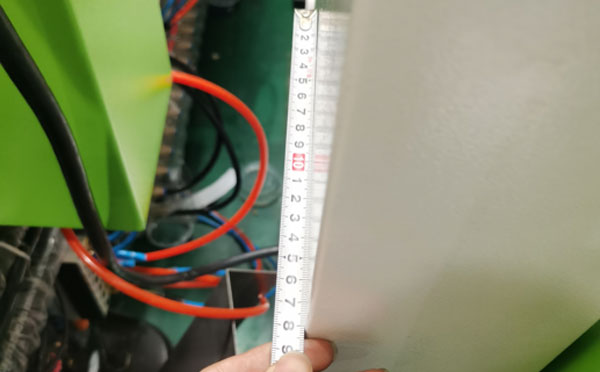
Regolare la posizione verticale del robot IML rispetto alla macchina per stampaggio a iniezione. Possiamo utilizzare una gru o un carrello elevatore per spostare l'estremità del robot IML per regolare la distanza tra il manichino e la cavità dello stampo e garantire che la deviazione su entrambi i lati sia <1 mm.
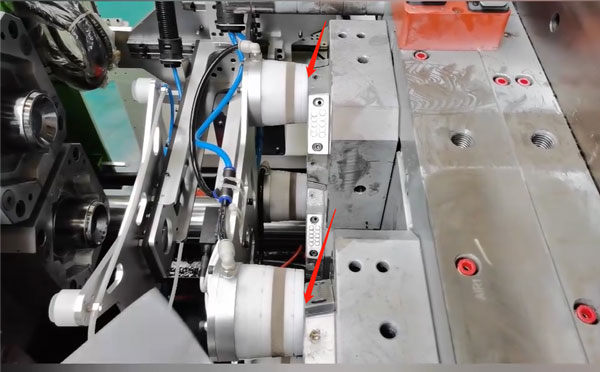
Sollevando o abbassando la colonna su un lato del robot IML, è possibile correggere la deviazione superiore e inferiore del mandrino.


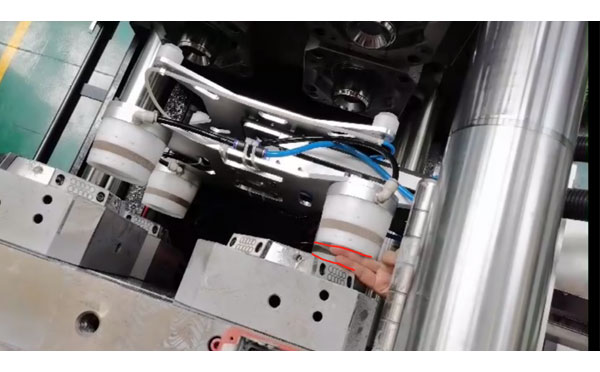
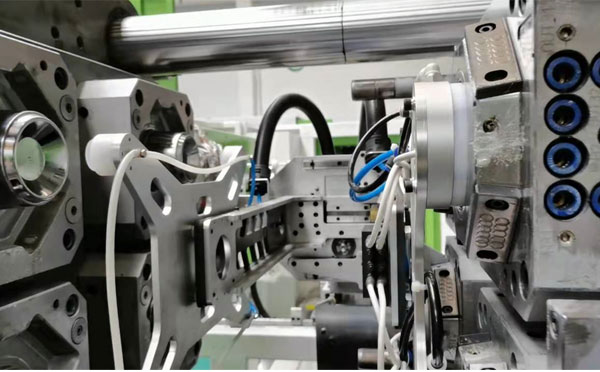
Con il servocomando scollegato, se i mandrini possono essere spinti manualmente nelle cavità dello stampo, significa che il livello del robot IML è ben regolato.

Si fa iniettare un campione nello stesso stampo, si tagliano la parte superiore e inferiore e si inserisce l'anello nella cavità dello stampo, si spingono i mandrini nell'anello e si fissa il mandrino al dispositivo di fissaggio.
Fase 4: Sostituzione del caricatore e regolazione del livello.
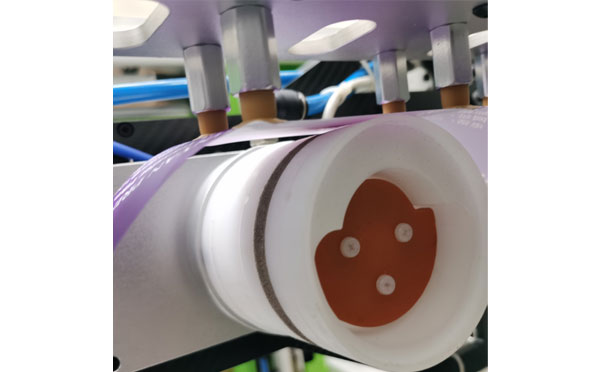

All'avvio del robot IML, possiamo far sì che il cilindro di prelievo etichette prelevi un'etichetta dal magazzino e la avvolga sul mandrino, mantenendo uno spazio di 1~2 mm tra il bordo dell'etichetta e il fondo del mandrino per garantire che le etichette vengano inserite perfettamente nelle cavità dello stampo.
Regolare la posizione della ventosa per garantire che i prodotti possano essere aspirati.
Dopo aver completato la regolazione del livello, il robot IML è pronto per essere programmato per la produzione di contenitori IML. Seguire le ISTRUZIONI del robot IML per modificare la posizione in cui l'etichetta deve essere prelevata e posizionata. Per qualsiasi domanda sull'installazione e la regolazione del robot IML SWITEK, non esitate a contattare un nostro tecnico: il nostro supporto tecnico online sarà sempre a vostra disposizione.
Tecnologia IML Express
Fakuma 2023 - - Nestal in mostra Elion 1750, macchina per lo stampaggio a iniezione completamente elettrica con soluzioni IML chiavi in mano
Il nuovo robot IML con ingresso laterale SWITEK per il bidone della polvere IML da 55 litri è pronto per i test interni
K-2022, Yizumi presenta la soluzione IML chiavi in mano con la macchina per stampaggio a iniezione completamente elettrica ad alta velocità PAC250E
Visita Chinapls 2025, fai un tour della fabbrica di GuangDong SWITEK Technology
Concentrandosi sull'economia circolare, YIZUMI machinery sta promuovendo la sua macchina per stampaggio a iniezione completamente elettrica per ridurre al minimo il consumo di energia per kg.
SW7112DS - Il robot di iniezione ad alta velocità Best Buy per contenitori a parete sottile
Il robot SWITEK 2 Cavities IML per secchio da 10 litri è pronto per i test
SWITEK Avviato il nuovo sistema IML Burger King Twin-Cups a 4 cavità con ingresso laterale
NPE 2024, ChenHsong Machinery in mostra Soluzioni IML chiavi in mano
Arburg on show 2 cavlities 1Litter bucket IML system with handle assembly in 2012.
Contatta SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China





